1-2
CK3M-series Operating Procedure
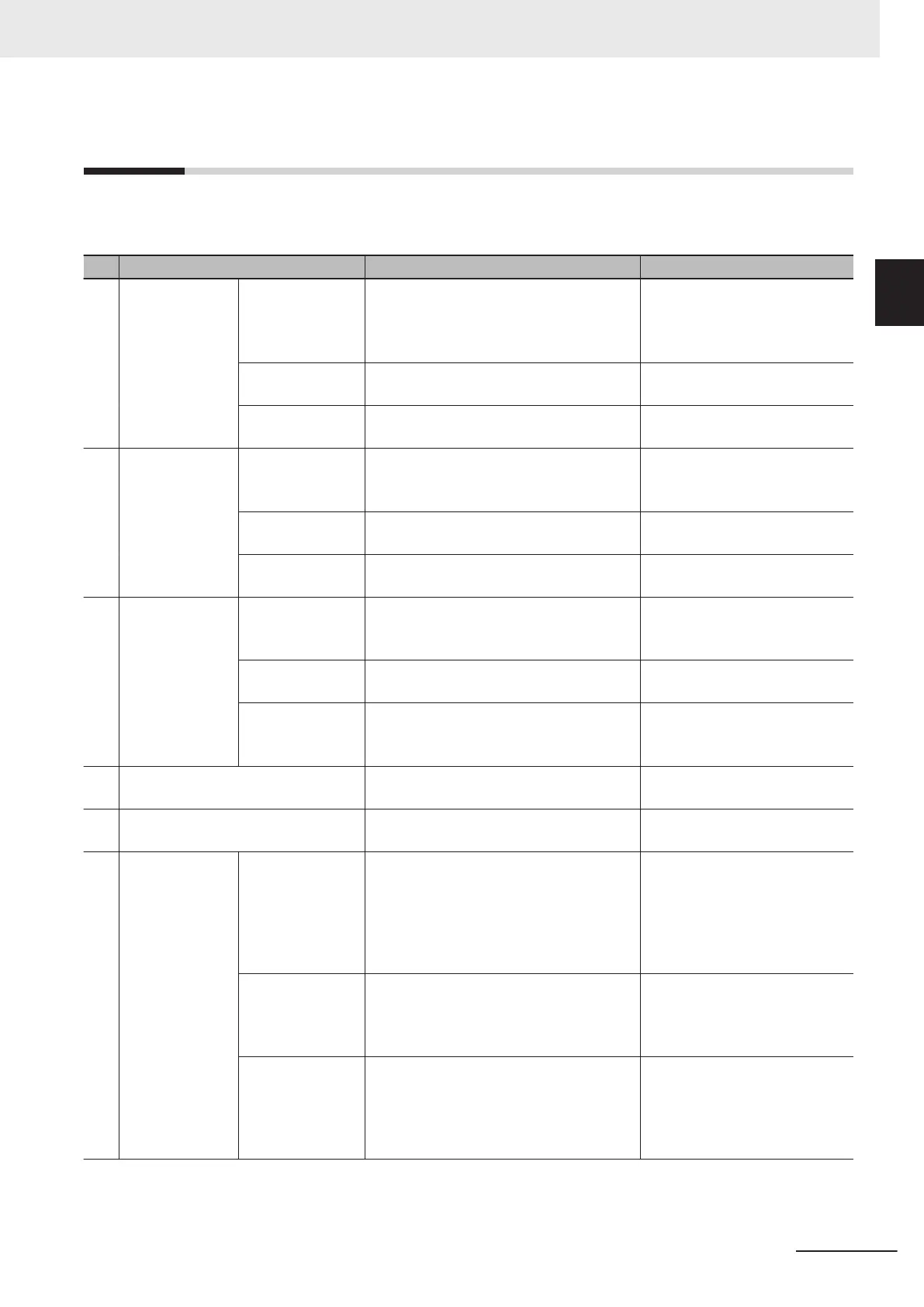
This section describes the procedure to construct a motion control system by using the CK3M-series
Programmable Multi-Axis Controller.
No. Step Description Reference
1 Preparation for
work
Check for specifi-
cation compatibili-
ty
Check compatibility with specifications of
each Unit.
• General specifications
• Mounting direction
A-1 General Specifications on
page
A-2
Selection of pe-
ripheral devices
Select peripheral devices to be used with
the Motion Controller.
Preparation of
Support Software
Procure and install the Support Software
required for the system.
1-1-3 Support Software on page
1-
4
2 Mounting and
wiring of the
Mo-
tion Controller
Mounting Mount the Motion Controller.
• Connecting adjacent Units
• Mounting to DIN Track
4-3 Mounting Units on page
4-5
Address switch
setting
Set the address switches for the CK3W
Units.
3-3-4 Address Switch Setting on
page 3-16
Wiring Perform Motion Controller wiring. Section 5 Wiring on page
5-1
3 Settings and wir-
ing of the Ether-
CA
T slave hard-
ware
*1
Node address
settings
Use the hardware switches on all of the
EtherCAT slaves in the network to set the
node addresses.
Refer to the manual for the
EtherCAT slave.
Mounting Mount EtherCAT slaves. Refer to the manual for the
EtherCA
T slave.
Wiring Wire EtherCAT slaves.
• Wiring of the unit power supply
• I/O wiring
Refer to the manual for the
EtherCA
T slave.
4
EtherCAT communications wiring
*1
Perform wiring for the EtherCAT commu-
nications cables.
5-2-1 Laying the EtherCAT Net-
work on page 5-7
5 Turn ON the power supply to Ether-
CA
T slaves.
Turn on the power to the devices configur-
ing the system.
6 Construction of
the EtherCA
T
network
*1
Installation of ESI
files
Install the ESI files of EtherCAT slaves to
be connected.
Refer to Power PMAC IDE User
Manual (Cat. No. O016) for de-
tails.
For information on the ESI file,
refer to the manual for the
EtherCAT slave.
EtherCAT slave
settings
Configure the EtherCAT communications
settings. Then, create an ENI file used to
download the configured settings to the
Motion Controller
.
Refer to Power PMAC IDE User
Manual (Cat. No. O016) for de-
tails.
Activation of the
EtherCA
T network
Use Power PMAC IDE to download the
ENI file to the Motion Controller.
Make sure that the ENI file has been cor-
rectly downloaded, and then activate the
EtherCAT network.
Refer to Power PMAC IDE User
Manual (Cat. No. O016) for de-
tails.
1 Introduction to Motion Controllers
1-5
CK3M-series Programmable Multi-Axis Controller User's Manual Hardware (O036)
1-2 CK3M-series Operating Pro-
cedure
1
 Loading...
Loading...







