Omron TM Collaborative Robot S Series: TM12S and TM14S Hardware Installation Manual
4.2.1.4 Payload and Torque
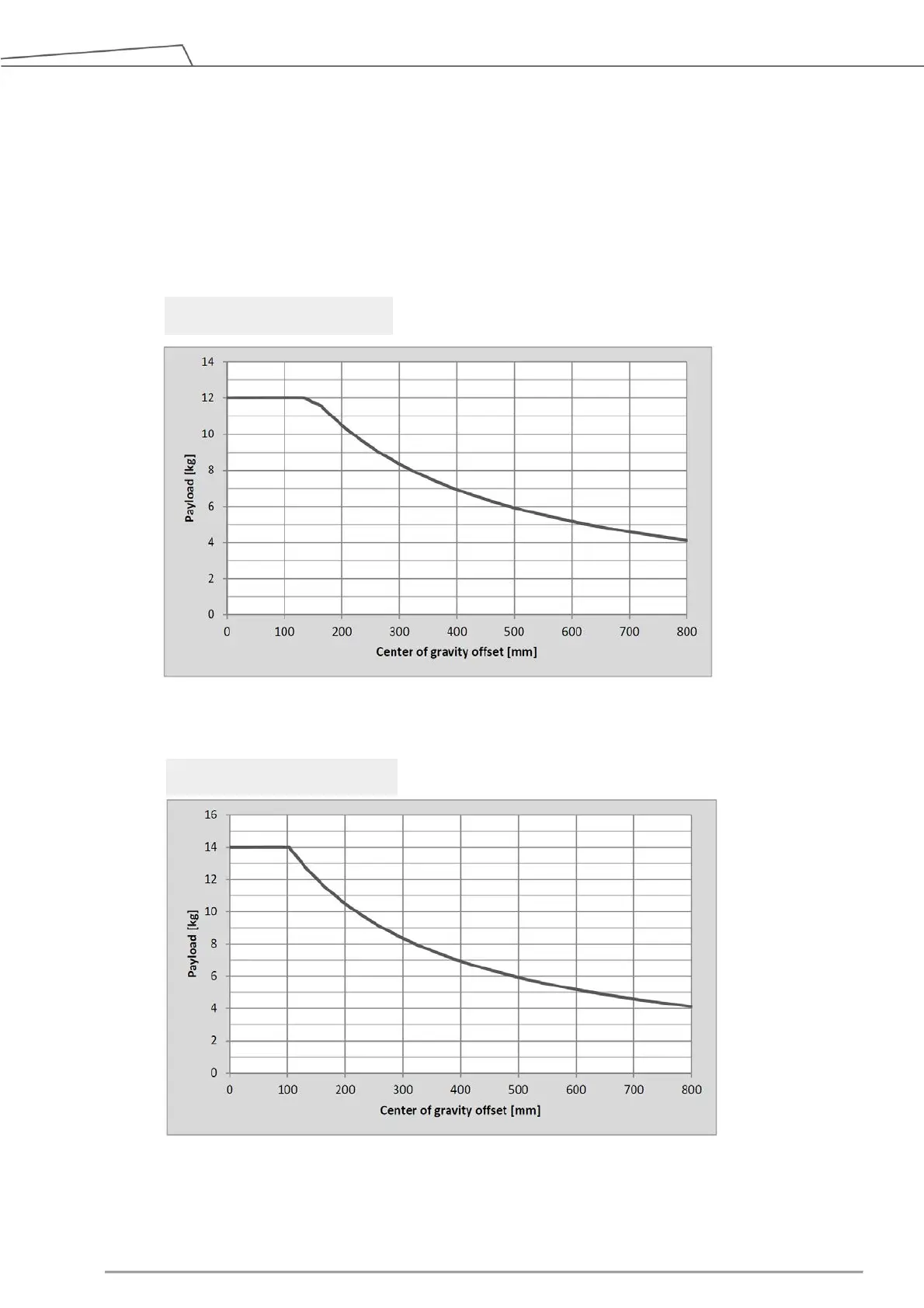
The maximum allowed payload of the robot arm is related to its center of gravity offset, which is defined
as the distance from the center point of the robot end of the flange to the payload’s center of gravity.
The following figure shows the relationship between payload and the center of gravity offset:
Figure 14: Relationship between Payload and the Center of Gravity Offset in TM12S / TM12S-M / TM12S-X
Figure 15: Relationship between Payload and the Center of Gravity Offset in TM14S / TM14S-M / TM14S-X
Refer the table below for the rated torque and the limit of repeated peak torque of the robot. Exceeding
TM12S / TM12S-M / TM12S-X
TM14S / TM14S-M / TM14S-X
 Loading...
Loading...






