7
Controller system settings
7-14
• Set the workpiece weight held at the robot tip for the tip weight of the robot parameters.
• The value of the arm length parameter may affect the acceleration. The effective stroke value of each axis needs to
be input for the arm length.
■
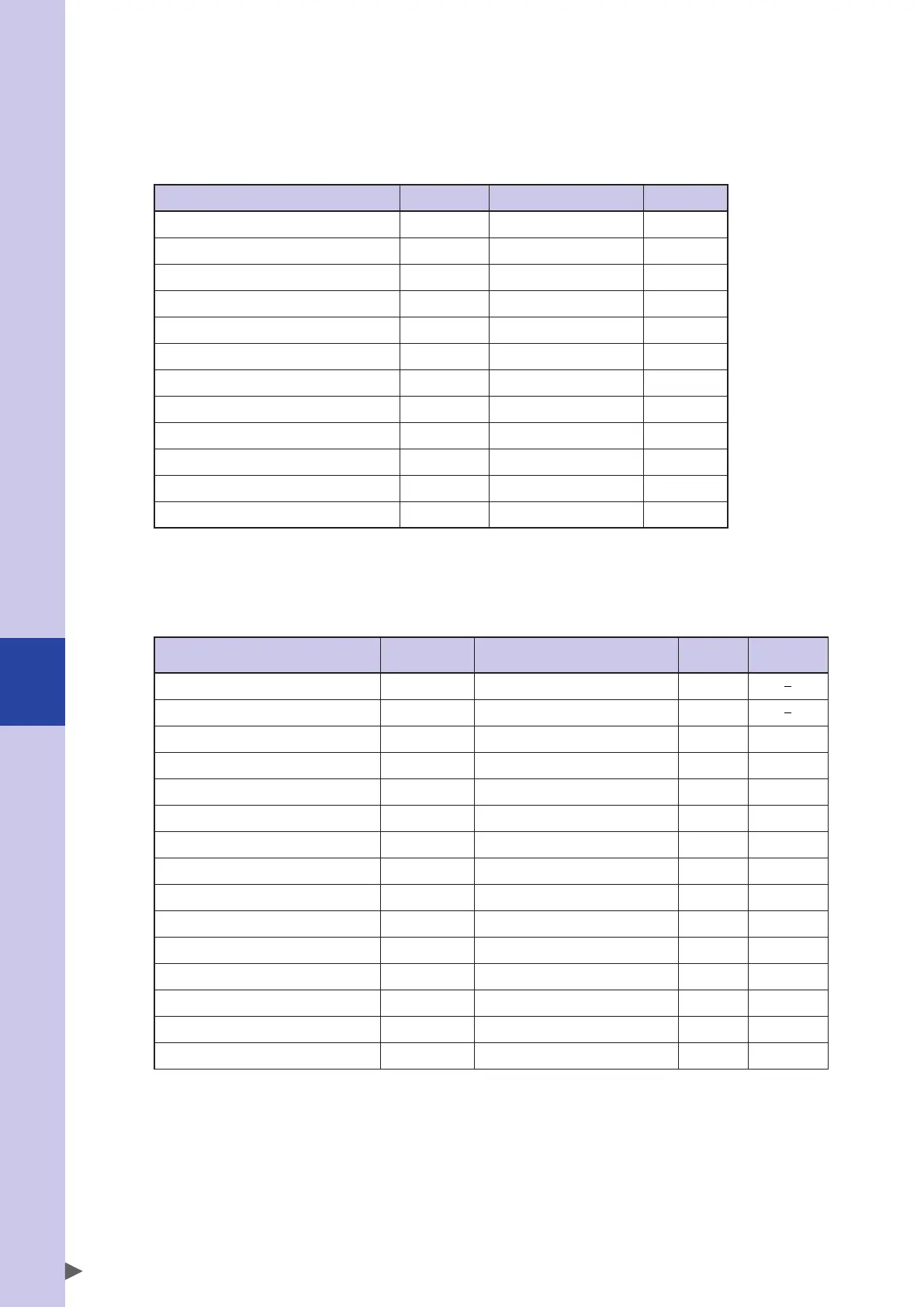
I/O parameters
For details about parameters, refer to "10.7 I/O parameters" in this Chapter.
Name Identifier Setting range Initial value
DO output at emergency stop EMGCDO
0: IO_RESET, 1: IO_HOLD
1
Error output (DO & SO)* ERPORT 0 to 0277 (Octal) 0
Battery warning output (DO & SO)* BTALRM 0 to 0277 (Octal) 0
DIO Noise Cancel Num. DIOCAN 0 to 7 1
DO output at program reset RESCDO
0: IO_RESET, 1: IO_HOLD
0
Remote command RMTCMD 0: INVALID, 1: VALID 1
DI17 mode DI17MD 0: ABS, 1: ABS_ORG 0
Indiv. Origin IOORGMD 0: INVALID, 1: VALID 0
Axes sel. port (DI & SI) IOORGIN 2 to 027 (Octal) 2
Done output port (DO & SO)* IOORGOUT 0 to 027 (Octal) 0
Servo output port (DO & SO)* IOSRVOUT 0 to 027 (Octal) 0
Gripper origin axes select port (DI & SI)* GRPORGIN 0 to 027 (Octal) 0
* New setting values will be valid after turning off and on the power.
■
Option parameters
For details about parameters, refer to "10.8 Option board related parameters" in this Chapter.
Name Identifier Setting range
Initial
value
Separate
manual
Option board enable* OPTENBL 0: INVALID, 1: VALID 1
Parallel IO ID* DIOID 1234 to 4321 1234
PROFIBUS station address* PBUSADD 1 to 125 125
✔
Gripper servo when emergency stop GEMGMD 0: OFF, 1: ON 1
✔
Include Gripper in Origin GORGMD 0: NO, 1: YES 1
✔
Manual Holding of Gripper GMHLMD 0: INVALID, 1: VALID 1
✔
Gripper origin sequence GORGORD 1234 to 4321 1234
✔
Gripper origin priority GORGPRI 0: AFTER, 1: BEFORE 0
✔
DeviceNet address ID DEVADD 0 to 63 0
✔
DeviceNet baudrate DEVCOM 0:125K, 1:250K, 2: 500K, 3: AUTO 0
✔
DeviceNet I/O type DEVTYP 0: NORMAL, 1: COMPACT 0
✔
EtherNet/IP IP address EIPADD 0.0.0.0 to 255.255.255.255 0.0.0.0
✔
EtherNet/IP subnet mask EIPSUB 0.0.0.0 to 255.255.255.255 0.0.0.0
✔
EtherNet/IP default gateway EIPDEF 0.0.0.0 to 255.255.255.255 0.0.0.0
✔
EtherNet/IP DHCP enable EIPDHCP 0: INVALID, 1: VALID 0
✔
* New setting values will be valid after turning off and on the power.