3
Installation
3-13
10.2 Methods of preventing malfunctions
To prevent malfunctions due to noise, take into account the following points.
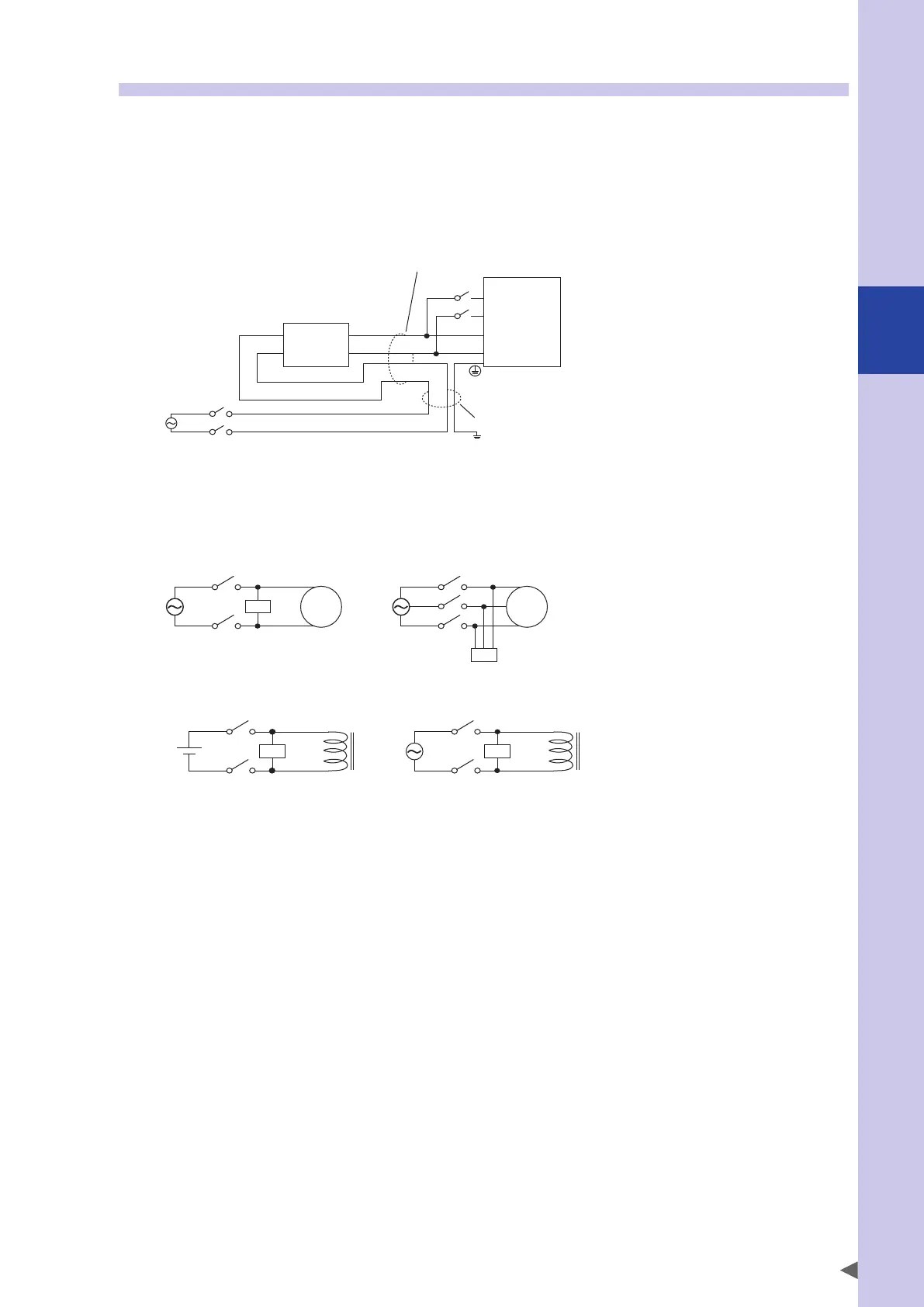
1. Place a noise filter and ferrite core at a point near the robot controller.
Do not bundle the primary wiring and secondary wiring of the noise filter together.
■
Noise filter installation
Bad example:
Noise
filter
Robot
controller
Primary wiring
L1
N1
L
N
Ground wire
Primary and secondary sides for the noise filter are bundled together.
Ground wire is bundled with primary wire.
Secondary
wiring
2. Always attach a surge absorber to the coil of inductive loads (induction motor, solenoid valve, brake
solenoid, relay and so on) located near the robot controller.
■
Example of surge absorber circuit
For induction motor
A
A
A: Surge killer
Single-phase
motor
3-phase
motor
For solenoid valve, solenoid
B: Diode, varistor, CR elements
DC type
C: Varistor, CR elements
AC type
B C