7
Controller system settings
7-18
■
Origin sequence
‹
ORGORD
›
This parameter sets the order of return-to-origin operation using the axis number (1 to 6).
Axes perform return-to-origin operation in order from the left end. Axes that are not set finally perform return-to-origin
operation at the same time. When this parameter is initialized, "312456" is set.
CAUTION
When performing return-to-origin of three or more axes with the return-to-origin method set at the stroke end
method, the emergency stop may be activated.
At this time, change the stroke end return-to-origin method to simultaneous two axes or return-to-origin of each axis.
NOTE
•
Perform return-to-origin operation from an axis that may interfere with a peripheral device.
• This order includes the robot axis and axillary axis.
When different position detection methods (absolute specifications or incremental specifications) are mixed in
one robot, the order of return-to-origin operations may vary depending on the return-to-origin method.
Example:
Robot axis configuration: Axis 1, axis 2, axis 3, axis 4
Return-to-origin order setting: 312456
Position detection method of each axis: Axis 1, axis 2
Incremental specifications
Axis 3, axis 4
Absolute specifications
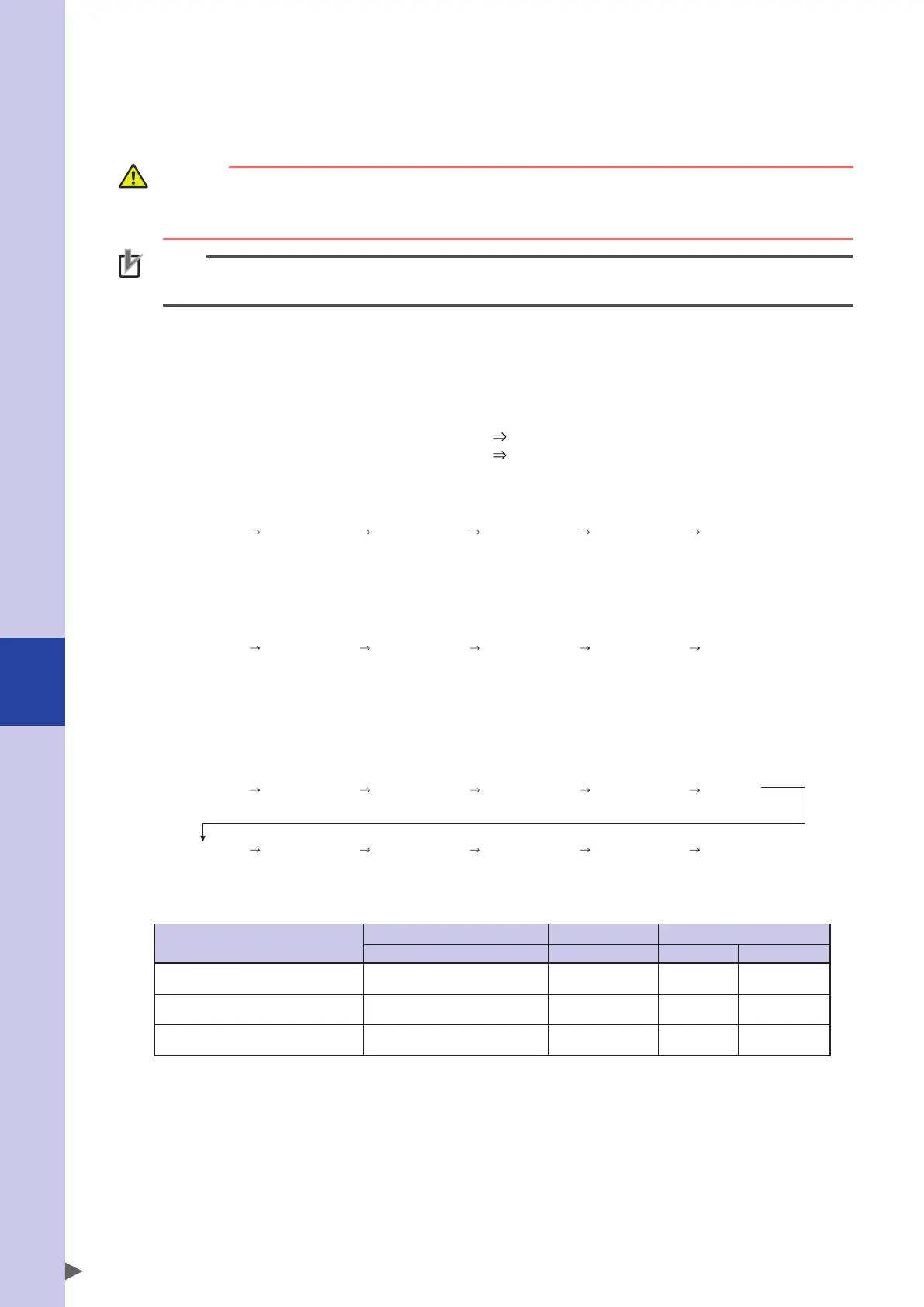
1. Return-to-origin operations of only the absolute type axes are performed.
Return-to-origin operations of only the absolute type axes are performed from the left end of the return-to-
origin order setting in order.
3 1 2 4 5 6
Axis 3 operation Axis 1 cancel Axis 2 cancel 4 operation Axis 5 cancel Axis 6 cancel
2. Return-to-origin operations of only the incremental type axes are performed.
Return-to-origin operations of only the incremental type axes are performed from the left end of the return-
to-origin order setting in order.
3 1 2 4 5 6
Axis 3 cancel Axis 1 operation Axis 2 operation Axis 4 cancel Axis 5 cancel Axis 6 cancel
3. Return-to-origin operations of both the absolute type and incremental type axes are performed.
First, return-to-origin operations of the absolute type axes are performed from the left end of the return-to-
origin order setting in order.
Subsequently, return-to-origin operations of the incremental type axes are performed in the same manner.
3 1 2 4 5 6
Axis 3 operation Axis 1 cancel Axis 2 cancel Axis 4 operation Axis 5 cancel Axis 6 cancel
3
1 2 4 5 6
Axis 3 cancel Axis 1 operation Axis 2 operation Axis 4 cancel Axis 5 cancel Axis 6 cancel
The actual example of return-to-origin operation is shown below.
Programming box operation PGM execution IO operation
Key operation Command *1 Input port DI17 mode *2
Absolute specifications only Impossible (possible by-axis) ORIGIN 0, 2 DI17 ABS
Incremental specifications only Impossible (possible by-axis) ORIGIN 0, 1 DI14 ABS
Both specifications at the same time "ALL" ORIGIN 0, 0 DI17 ABS/ORG
*1 For details about ORIGIN command, refer to the YRCX programming manual.
*2 This is the DI17 mode setting of the control parameters.