7
Controller system settings
7-26
■
Offset pulse
‹
OFFSET
›
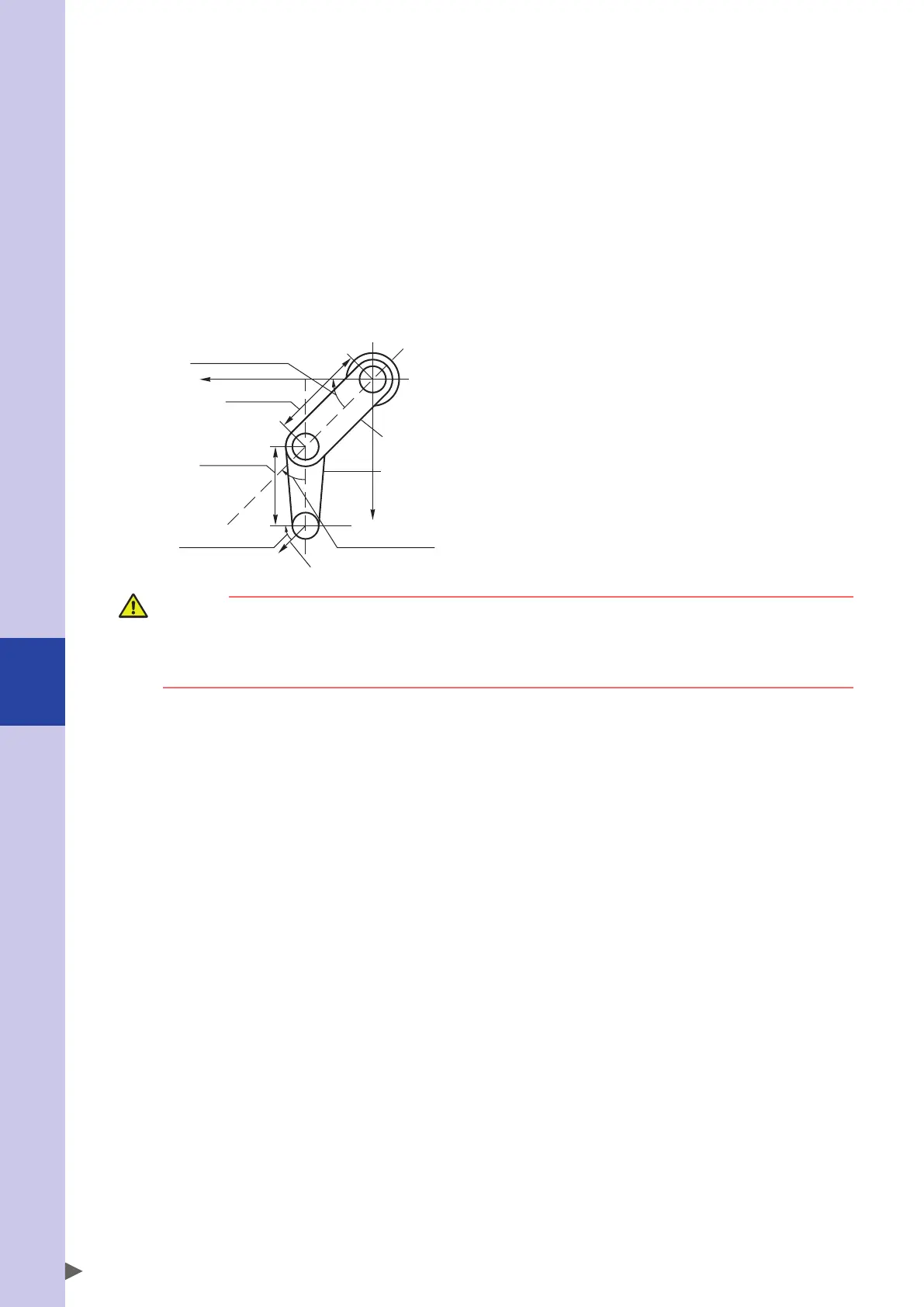
This parameter sets the angle to the arm posture or standard coordinate axis in the status where the X, Y, and R-axis
motor positions of the SCARA robots are located at their "0"-pulse positions.
• X-axis offset pulse
… Angle formed by the plus (+) X-axis direction of the standard coordinates and the X-arm. (Unit: pulse)
• Y-axis offset pulse
… Angle formed by the X-arm and Y-arm. (Unit: pulse)
• R-axis offset pulse
… Angle formed by the plus (+) X-axis direction of the standard coordinates and the R-axis tip tool. (Unit: pulse)
When this parameter is initialized, "0" is set. Additionally, this parameter is set automatically when setting the standard
coordinates.
"Offset pulse" setting
Y
X
X-arm
Y-arm
Tip tool
X-axis offset pulse
Y-axis offset pulse
R-axis offset pulse
X-arm length
Y-arm length
CAUTION
• For SCARA type robots, coordinate conversion to the Cartesian coordinates is performed using the arm length
and offset pulse. Therefore, be sure to set the correct offset pulse.
• When the data is input using this parameter (press in the input cursor display status), the standard coordinates
are set.