Section V Parameter Function Table
80
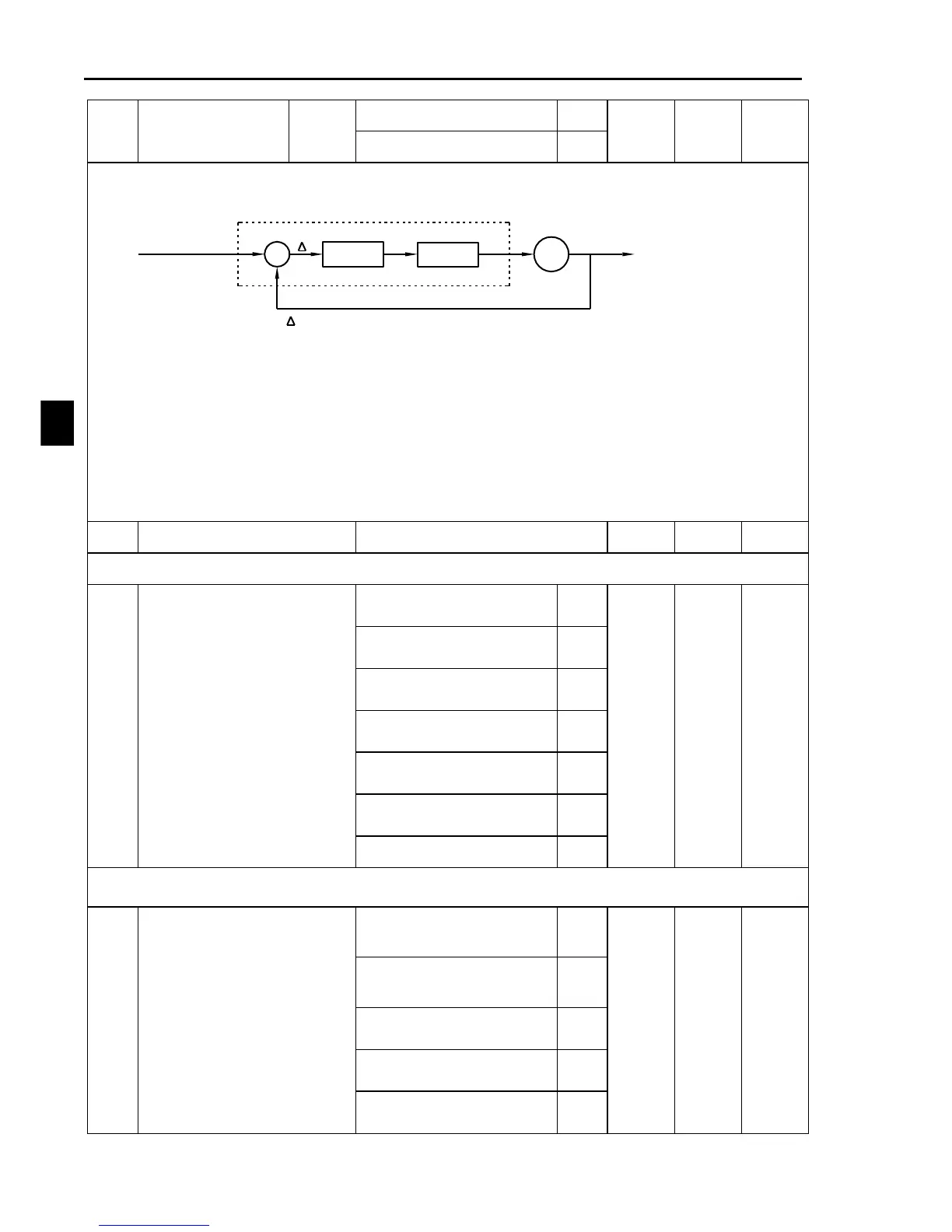
When the inverter receives running command, it can control output frequency automatically
in the PID regulation mode after comparing the setting signal and feedback signal from terminal.
The process is explained as following:
PID
inverter
setting signal
+
-
M
f
feedback signal
( = setting signal - feedback signal)
PI8000/PI8100 PID regulation
0: Negative action, when Δ>0 is positive, frequency rises and when Δ<0 is negative,
frequency falls.
1: Positive action, when Δ>0 is positive, frequency falls and when Δ<0 is negative,
frequency rises.
PID abnormity treatment:
1: Warning & Continuous running: continue running g after abnormity feedback signal.
2: Warning & Decelerating stop: decelerate and stop after abnormity feedback signal.
3: Warning & Free stop: free stop after abnormity feedback signal .
The parameter defines the limited range of the output when using PID control.
Feedback signal selection
Set frequency by
keyboard or RS485
AI1 external analogy
giving
8000
AI2 external analogy
giving
AI3 external analogy
giving
Keyboard potentiometer
giving
muti-step digital voltage
giving
PID feedback signal selection, can select keyboard/Rs485, potentiometer, digital voltage,
digital pulse for feedback signal.
Set frequency by keyboard
or RS485
AI1 external analogy
giving
8000
AI2 external analogy
giving
AI3 external analogy
giving
Keyboard potentiometer
giving

 Loading...
Loading...
