2F-85 & 2F-140 - Instruction Manual
Advanced Gripper Functions
The use of Gripper URCaps nodes allowsto move the gripper and modify its speed and force. However, some advanced functions
are only available through URScript commands.
The functionslisted below can be called using subprogramsin PolyScope or with a script. Functions with the suffix _and_wait will
wait for the gripper to complete its operation before going to the next step.
Single Gripper with I/O Coupling (UCH-1.0.0 + )
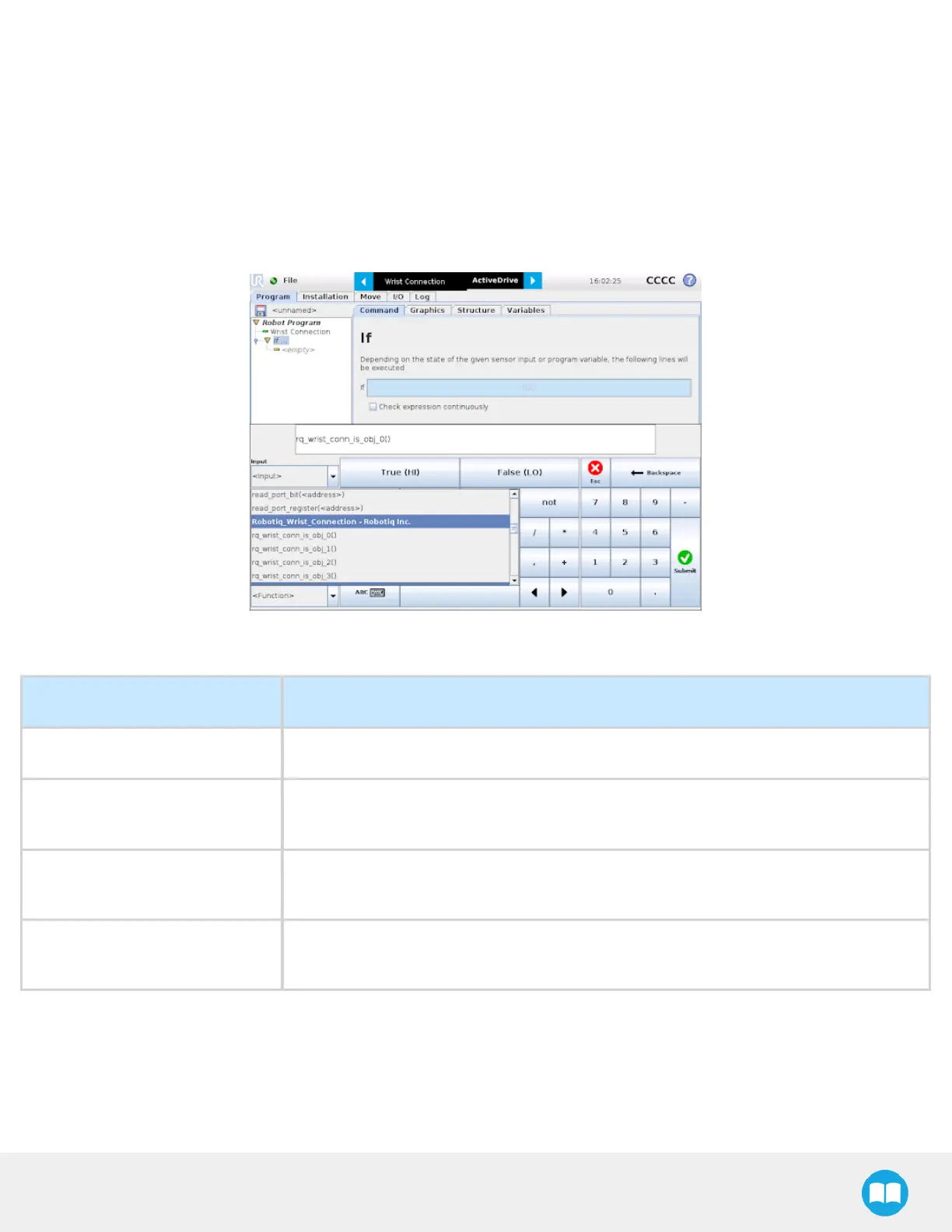
To use the Object Detectionfeature, the Tool Inputs can be used.
Fig. 4-35: Command window.
Tool Inputs configuration and Object Detect status are :
Name Description
rq_wrist_conn_is_obj_0 ( ) Fingers are in motion towards requested position. No object detected.
rq_wrist_conn_is_obj_1( )
Fingers have stopped due to a contact while opening before requested position.
Object detected opening.
rq_wrist_conn_is_obj_2( )
Fingers have stopped due to a contact while closing before requested position.
Object detected closing.
rq_wrist_conn_is_obj_3( )
Fingers are at the requested position. No object detected or object hasbeen lost /
dropped.