2F-85 & 2F-140 - Instruction Manual
5.1.3.Fingertips
The contact grip points for the Robotiq 2-Finger Adaptive Gripper are its two fingertips and palm pad.
Robotiq offers a selection of fingertips (see the Spare Parts, Kitsand Accessoriessection) and users can create custom fingertips.
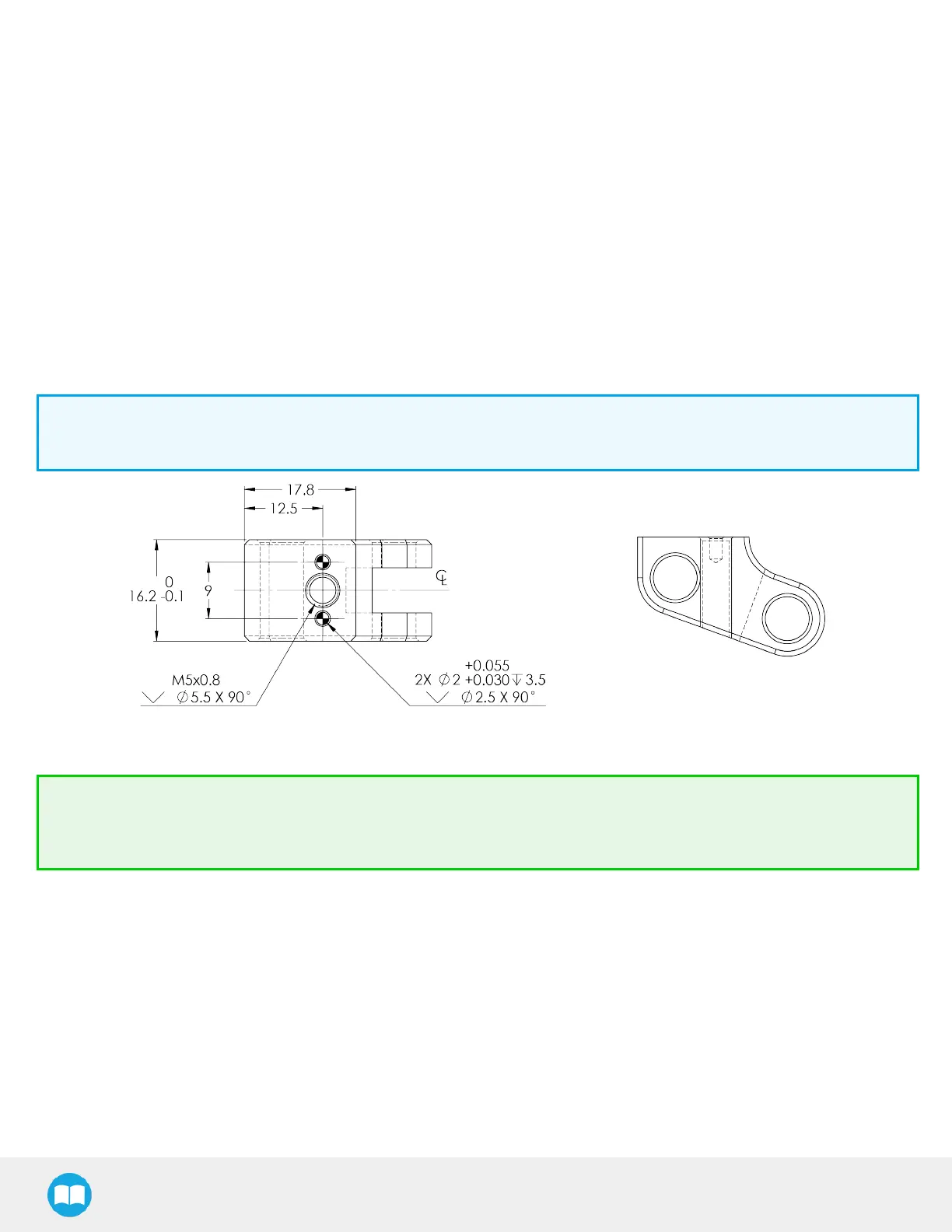
The figure below represents the distal phalanx (which actsas the fingertip holder). Thispart isthe permanent, non customizable
part of the gripper finger on which the fingertip must be mounted.
Custom fingertip designs must meet the following specifications:
l
Fingertip must not exceed 100 mm in height from the fingertip'sbase.
l
Fingertip must not exceed 100 mm in width from the fingertip's base (refer to Yaxis from Fig. 5-15).
l
Refer to the Mechanical specificationssection to evaluate the grip force according to your fingertip design.
l
Applied forcesto the gripper must not exceed moment and force limits detailed in the Moment and Force Limitssection.
Info
Both 2-Finger 85 and 2-Finger 140 use the same finger holder.
Fig. 5-6: Distal phalanx for holding standard or custom fingertips.
Tip
Custom fingertips will still be subject to the equilibrium line rule for proper actuation of the gripper, see Object picking
section.
121