Operation
54
04.00 | WSG 50 | Assembly and operating manual | en | 389474
7.7 Gripping, detecting parts to be gripped and monitoring the
gripping
The product is equipped with an integrated detector for parts to
be gripped and a grip monitor, which allows reliable handling even
for difficult parts without the use of external sensors. To configure
these functions, the following parameters are available on the web
interface Settings -> Motion Configuration:
Parameter Description
Part Width Tolerance
("Part Width Tolerance")
The tolerance of the specified nominal gripper width which is
sent to the product with the grasp command. This is
measured as the relative gap between two fingers moving
towards one another.
Clamping travel
("Clamping Travel")
If a part to be gripped has been detected, the product will
attempt to apply the required gripping force by moving the
fingers within this range. This is measured as the relative gap
between two fingers moving towards one another.
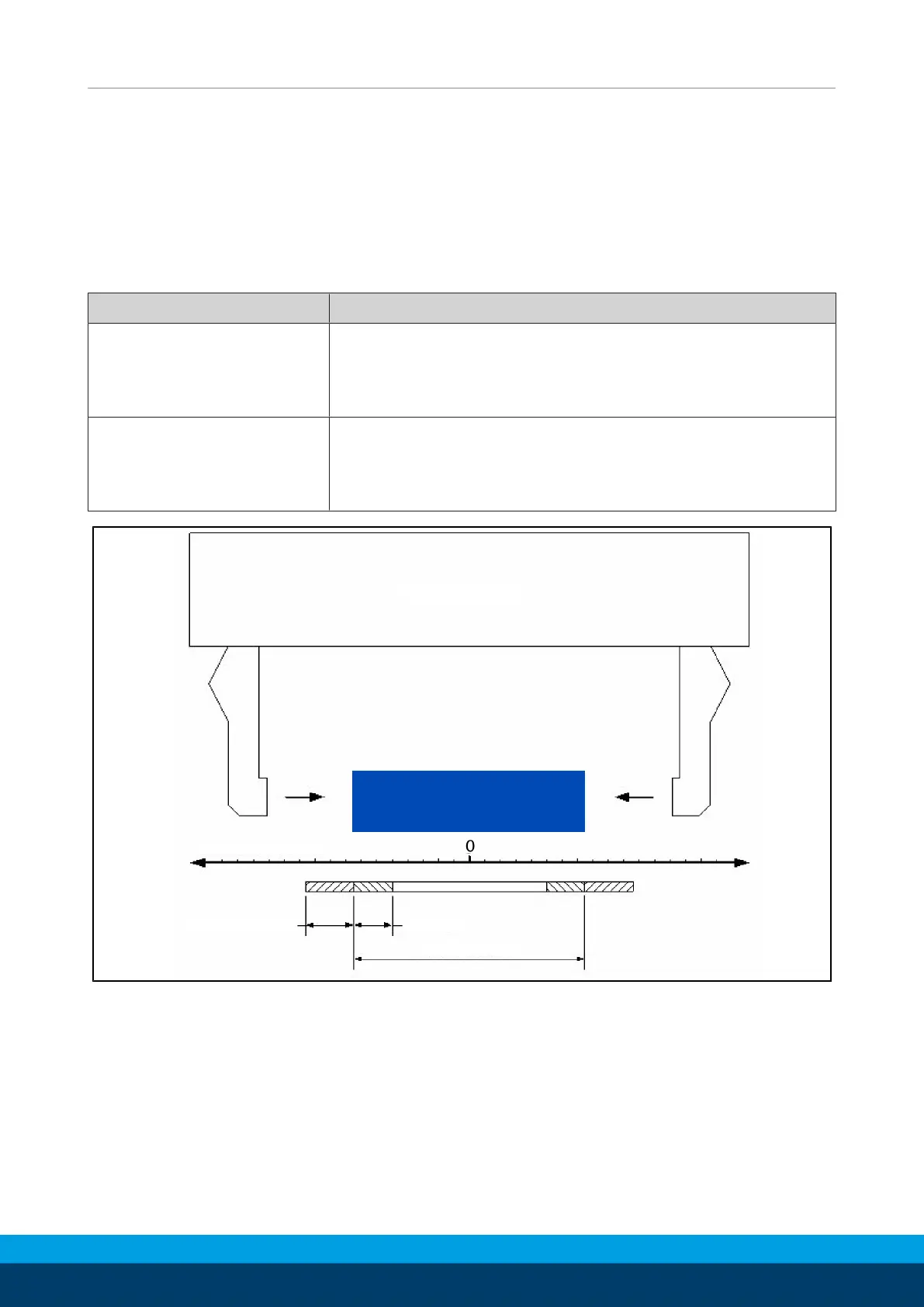
gripper module
workpiece
positive direction
nominal gripping width
clamping distance / 2
gripper width tolerance / 2
Parameters defining a grip