Operation
04.00 | WSG 50 | Assembly and operating manual | en | 389474
51
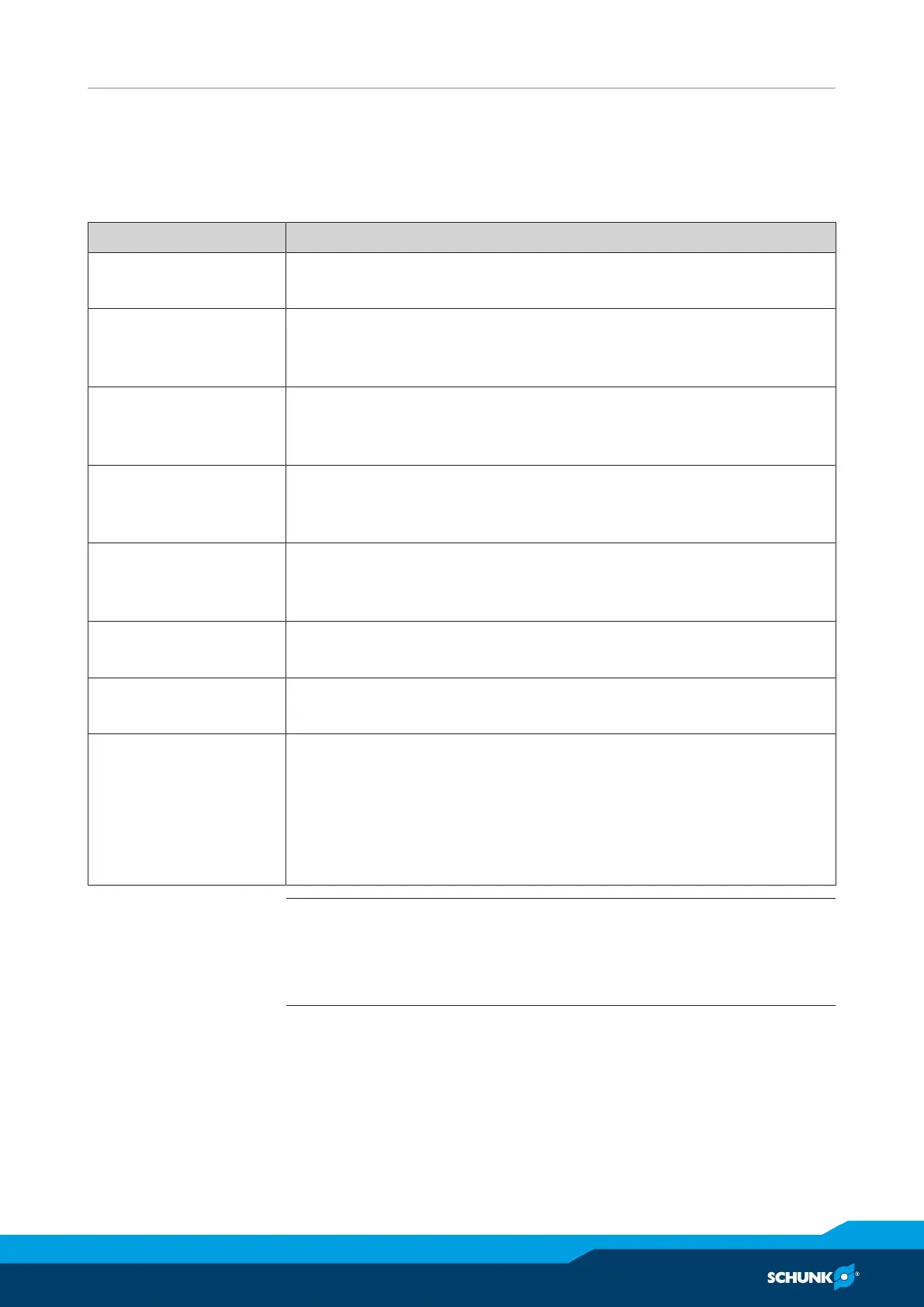
7.5.2 Gripper state
The gripper state reflects the current state of the gripper and is
used to control the process of gripping. It can take the following
states:
State Description
IDLE The gripper is in its idle state
No gripping process is currently in progress
GRIPPING The gripper is closing
A part is being gripped, the fingers are moving towards the part.
The detection of gripped items is active.
HOLDING A part is being held
A part is being held with the configured force. The monitoring of
the gripped part has been activated.
PART LOST A part has been lost
The pre-configured gripping force can no longer be applied,
presumably because the part to be gripped has been lost.
NO PART FOUND No part has been found
When closing the gripper at the configured position, no part was
found to be gripped.
RELEASING The gripper is opening
The gripped part is being released, the fingers are moving.
POSITIONING Pre-positioning
The gripper is being pre-positioned and the fingers are moving.
ERROR Error
An error occurred carrying out the last command. For errors
which require acknowledgment, the SF_FAST_STOP flag is also set
in the system status word.
After any acknowledgment required, the movement can be
restarted.
NOTE
The gripper's state does not indicate whether the gripper is
referenced or not. Instead, the system state flags
(SF_REFERENCED) must be read to check this.
The gripper's state is shown like the status word in the side bar of
the web interface. The following diagram shows the possible
transitions between the gripper’s states.