6. Navigation and Control System
SMF-MP10S User guide V1.1 Shanghai Seer Intelligent Technology Corporation 27
various mechanisms such as laser and motor. After the robot has the map, point location,
path, model file, and current location, it can plan a path to the destination point.
When the robot receives the map, model file, current location and destination point location,
the robot will plan a path from the current location to the destination point as short as
possible.
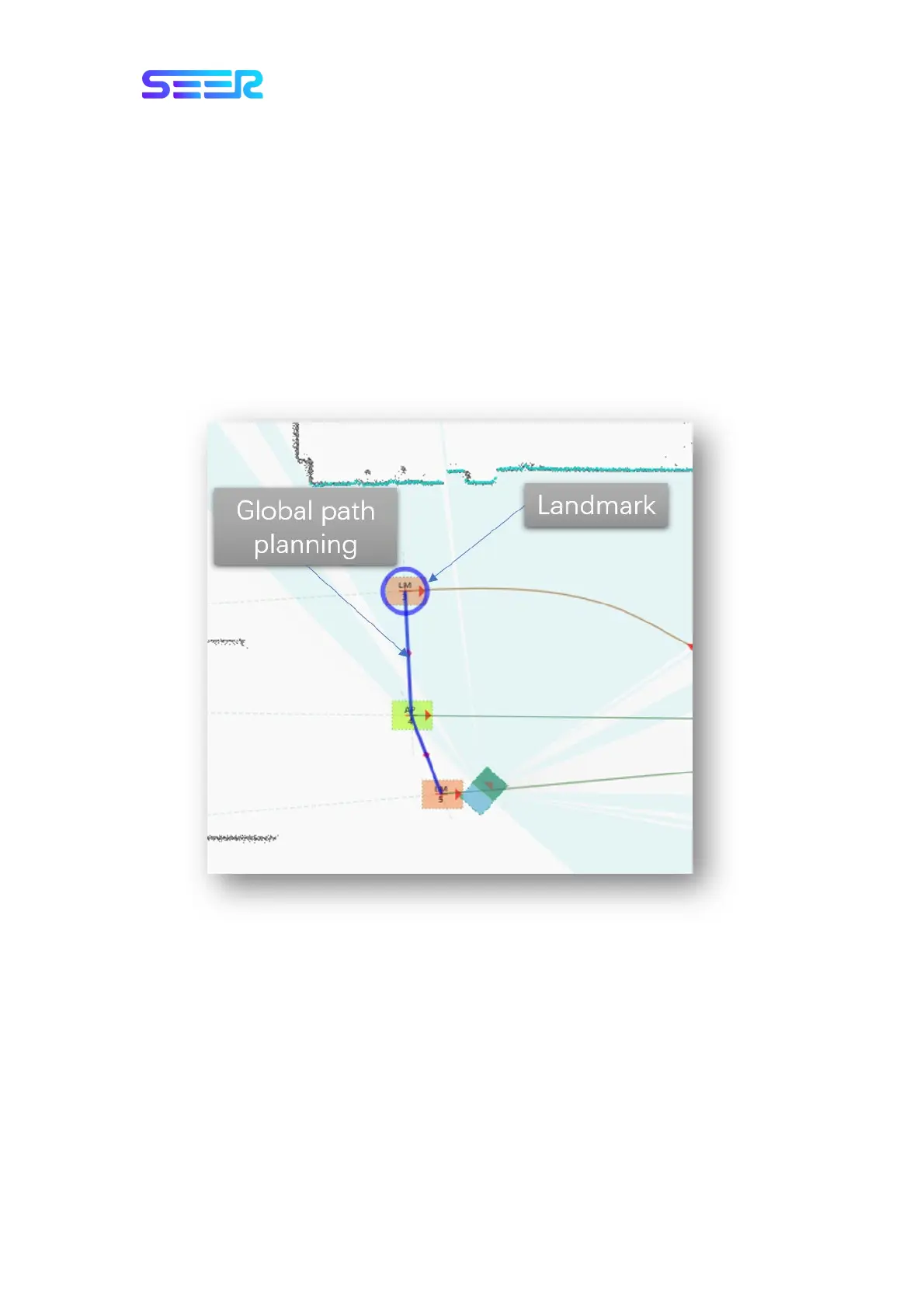
6.3 Global Path Planning
The global path planning means that the robot generates a path to the destination point.
The global path planning is performed only at the beginning of the task. During the global
path planning, the obstacles on the path will not be considered, but the deviation distance
of the robot from the path will be taken into account.
The blue circle is the destination point, and the blue line is the path planned by the robot.