6. Navigation and Control System
SMF-MP10S User guide V1.1 Shanghai Seer Intelligent Technology Corporation 28
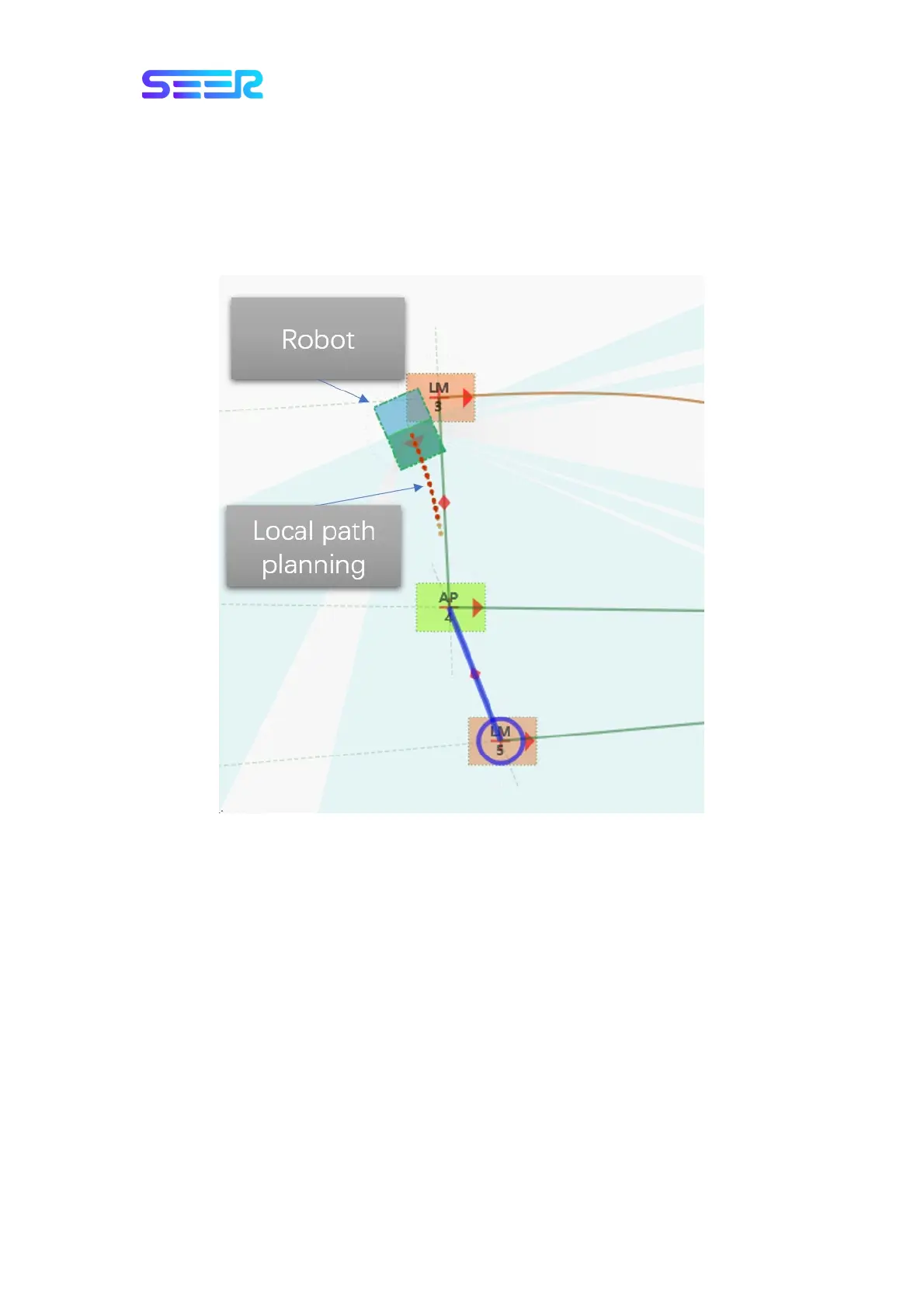
6.4 Local Path Planning
The robot will conduct real-time local path navigation while running. When encountering
obstacles, the robot will avoid obstacles. For the local path navigation, the speed of the
robot will also be planned to ensure smooth speed during the operation of the robot. When
the robot is beyond the path, it will automatically plan a route back to the path.
When the robot is beyond the path, the local path navigation function will generate a route
back to the path.