6. Navigation and Control System
SMF-MP10S User guide V1.1 Shanghai Seer Intelligent Technology Corporation 33
6.6.1.2 Non-detection Zone
Due to the characteristics of the navigation laser sensor, the objects lower or higher than its
detection height can’t be detected.
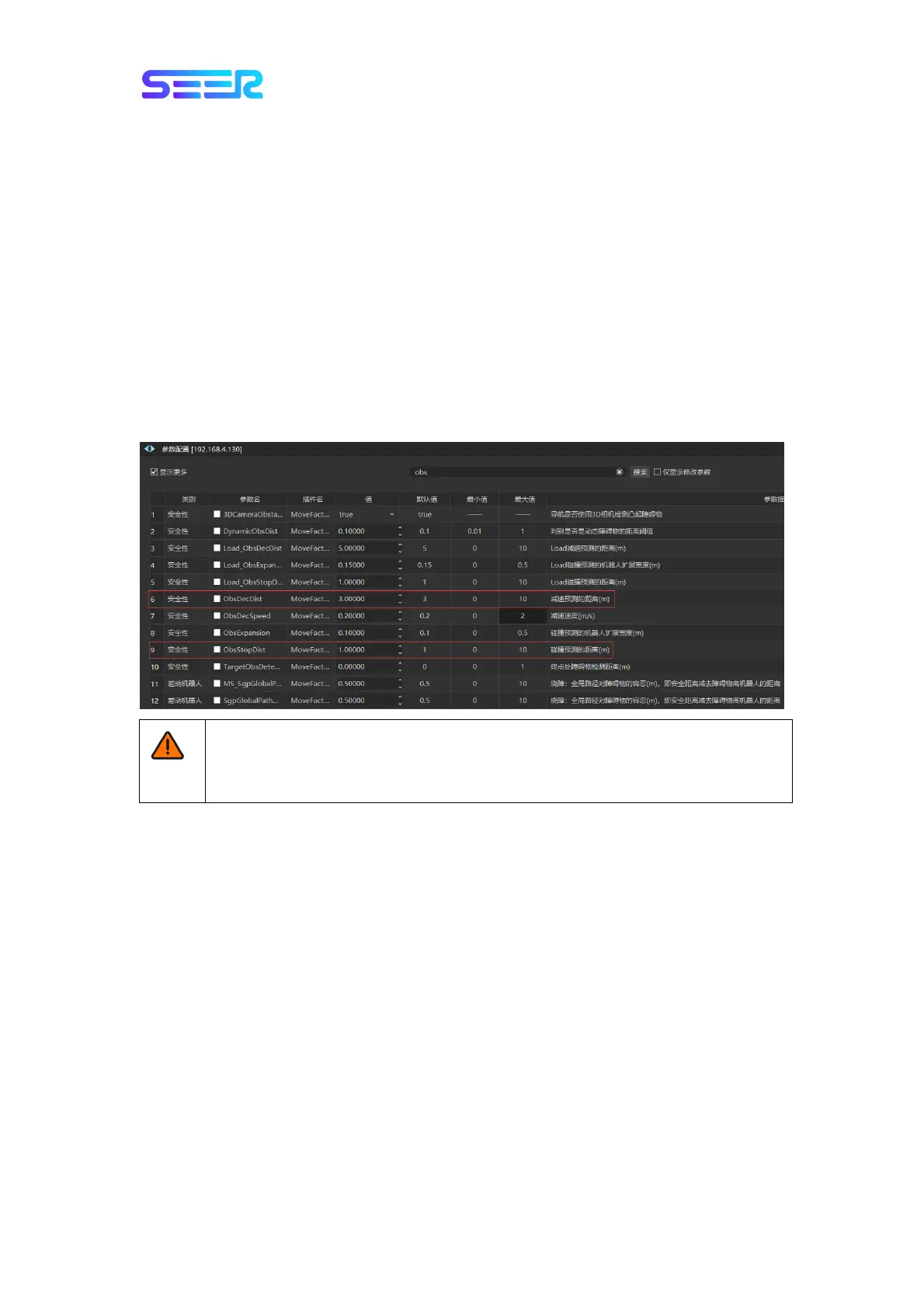
6.6.1.3 Actions after Detecting the Obstacles
When SMF-MP10S is delivered, the default deceleration (ObsDecDist) and stop (ObsStopDist)
districts have been set.
In the deceleration district (default value 3m), the robot will decelerate when the
navigation laser detects an obstacle.
In the stop district (default value 1m), the robot will stop when the navigation laser
detects an obstacle.
In Roboshop parameter configuration, you can modify this parameter by yourself.
Precautions for Parameter Configuration of Robot
● The collision detection will be turned off when ObsStopDist is set as 0. A collision
may occur at this time. Be careful!
6.6.1.4 Characteristics and Use Restrictions of Navigation Laser
Noise
The noise of the laser is caused by the principle of laser measurement. During laser ranging,
a light spot is emitted, which usually has a fixed divergence angle. Therefore, the longer the
measurement distance is, the larger the spot formed in the distance will be. If a light spot is
emitted while half illuminating the object in front and half of the object behind, and the
energy returned will be high, the distance measured here will be problematic, and the laser
noise will be generated generally.
Therefore, usually when the reflectivity of the background object is relatively high and the
foreground object is close to the background object, laser noise is likely to be generated at
the edge of the foreground object as shown in the figure below: