6. Navigation and Control System
SMF-MP10S User guide V1.1 Shanghai Seer Intelligent Technology Corporation 38
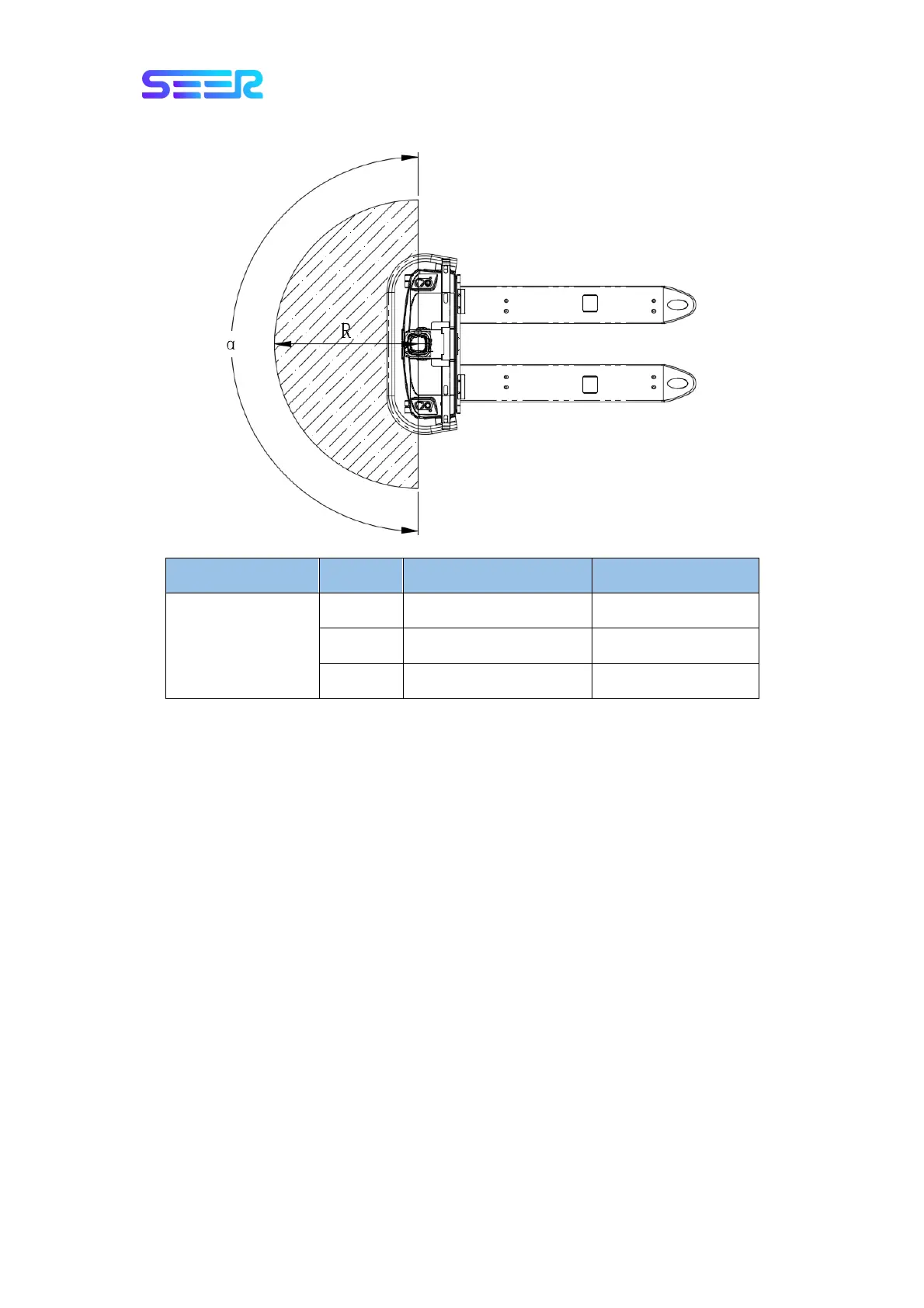
Model S/N Definition Parameter
SMF-MP10S
R Detection distance 10m
α Detection angle 180°
H Detection height 478mm
6.6.2.2 Non-detection Zone
Due to the characteristics of the laser sensor, the objects lower or higher than its detection
height can’t be detected.
6.6.2.3 Actions after Detecting the Obstacles
When SMF-MP10S is delivered, the default deceleration (ObsDecDist) and stop (ObsStopDist)
districts have been set.
In the deceleration district (default value 3m), the robot will decelerate when the laser
detects an obstacle.
In the stop district (default value 1m), the robot will stop when the laser detects an
obstacle.
In Roboshop parameter configuration, you can modify this parameter by yourself.