In the frequency inverter application, three mechanisms can be installed to allow timely
reaction to reports in the event registers.
•
These registers are polled cyclically.
•
The Online Status is polled cyclically. Event registers are mirrored here (see
chapter 7.6.2).
•
Either all, or individual event register events can be masked in the event mask reg‐
isters (registers MASK_H and MASK_L, see chapter 6.3.5), in order to issue events
via the interrupt interface (see chapter 5.3.2).
7.6.2 Online Status
The Online Status (see chapter 6.2) is transmitted during every SPI communication via
drive interface between the frequency inverter application and the DSL Master. The sta‐
tus contains the error and status reports from the event registers.
Unlike with direct polling of the event registers, the Online Status only shows the current
status values. As soon as the error status of the motor feedback system becomes
unavailable, the error is no longer indicated in the Online Status.
The event registers retain the error statuses until the registers are acknowledged. After
acknowledgment, the event registers are reset (see chapter 6.3.4).
The Online Status is updated after 200 µs at the latest.
7.6.3 Status summary of the motor feedback system
In addition, detailed motor feedback system errors and warnings are indicated in the
SUMMARY status summary register (18h, see chapter 6.3.14).
Each individual bit of the register indicates an error status of a functionality in the
motor feedback system (see table 41). The safety relevance of all of these error groups
is precisely described in this table.
It should be noted that the reading of detailed motor feedback system error messages
enables a more precise reaction to all fault indications in the status summary. In any
event a position-relevant fault will always also be signaled directly through the corre‐
sponding position fault indicators POS,
VPOS, or VPOS2.
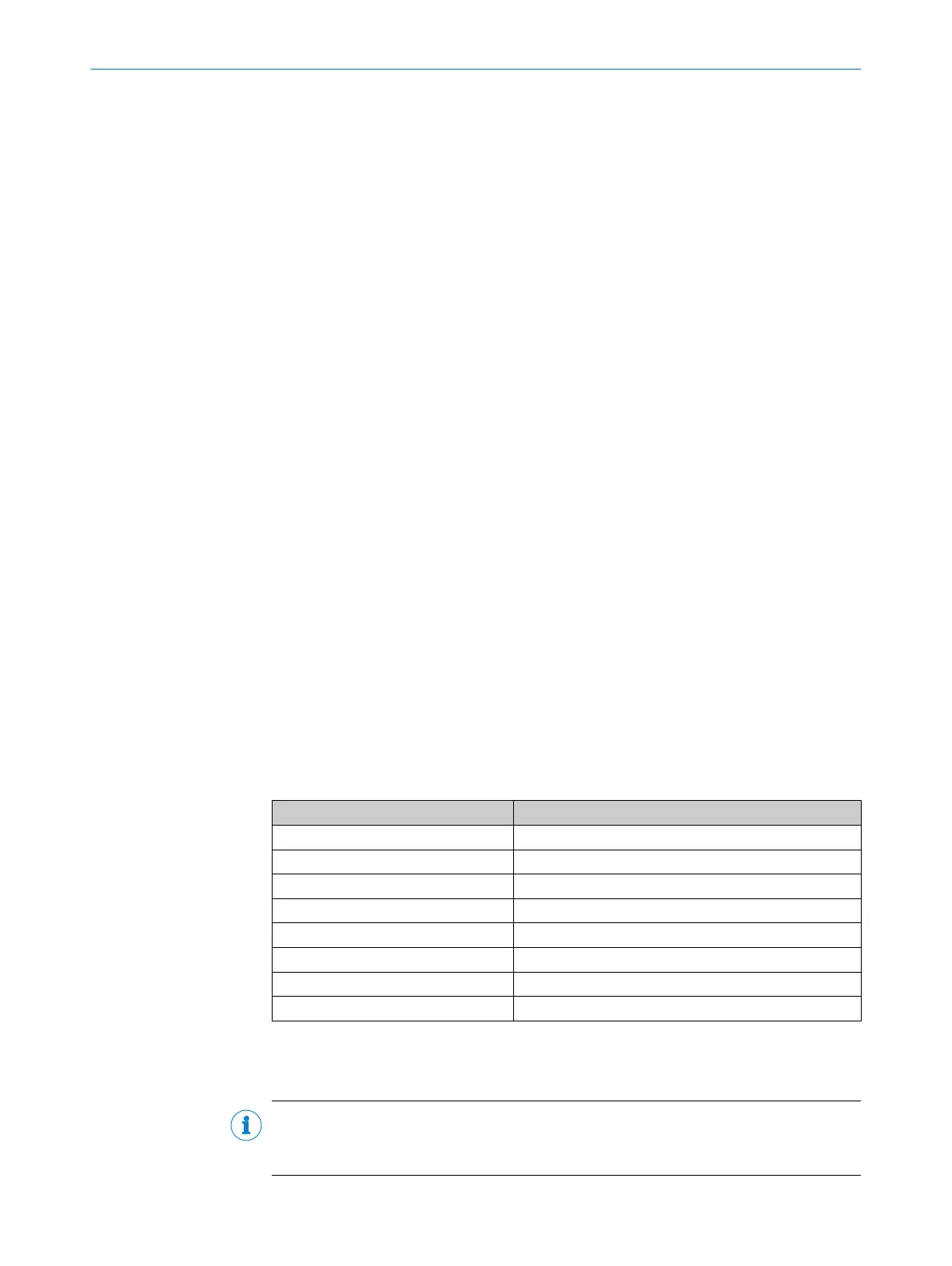
Table 41: Motor feedback system error groups
Bit no. Error group
0 1 = Fast position error
1 Safe position error
2 Installation error
3 Monitoring error
4 Error when accessing a resource
5 Reserved
6 Reserved
7 User-defined warnings
A bit set in the status summary register definitely indicates that one or more individual
errors in the motor feedback system have been recognized. The individual errors can be
determined by polling the remote encoder status register ENC_ST (see chapter 6.4.1).
NOTE
It should be noted that the SUM error bit in the EVENT_H event register represents an
aggregated summary of all error groups (see chapter 6.3.5).
CENTRAL FUNCTIONS 7
8017595/ZTW6/2018-01-15 | SICK T E C H N I C A L I N F O R M A T I O N | HIPERFACE DSL
®
75
Subject to change without notice