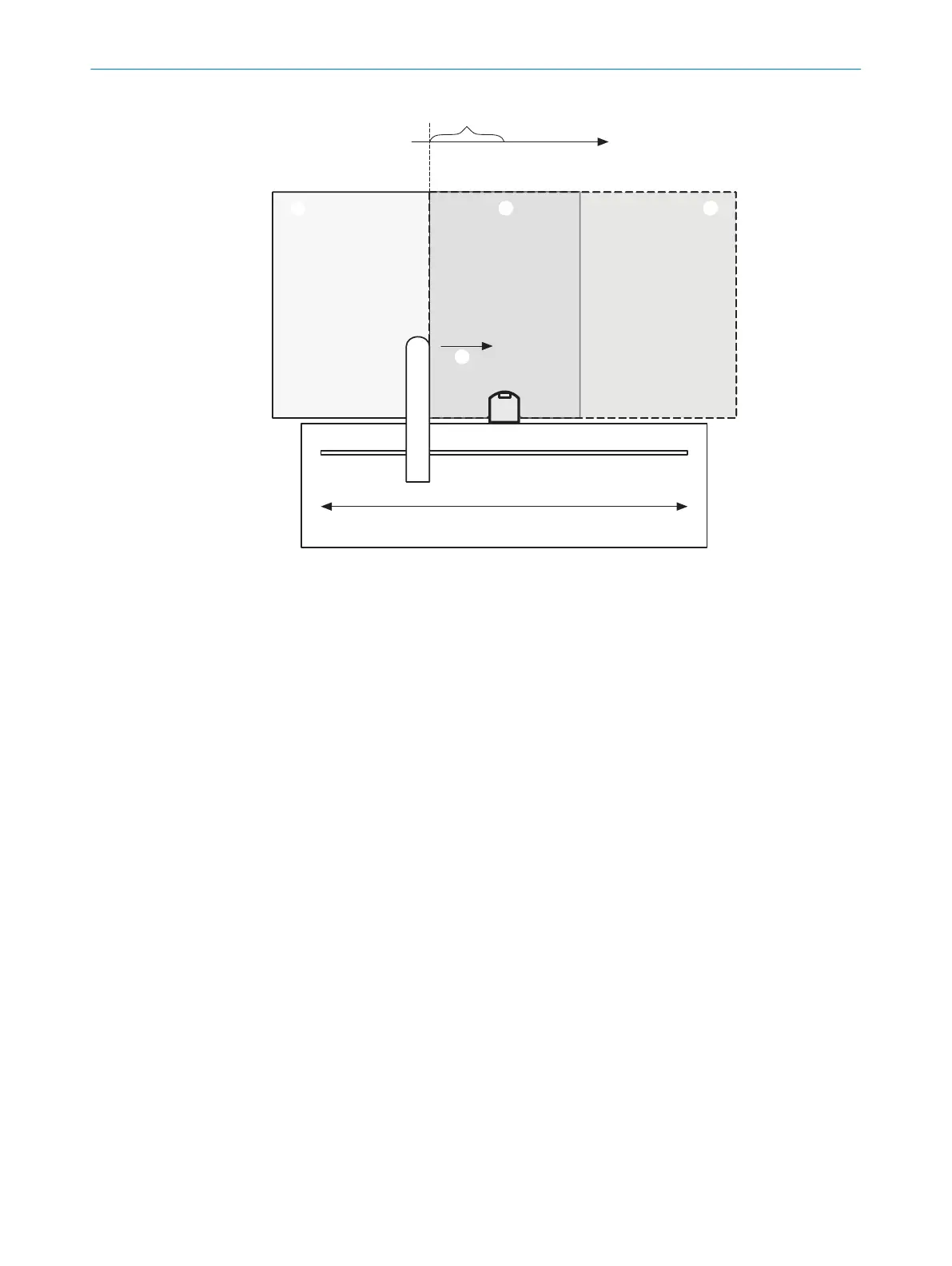
Figure 30: Advancing the switching time (example)
T
he gantry robot 1 moves to the right 2. The dangerous movement is being monitored
on the left-hand side by one of the monitoring cases 3. Due to the required advance‐
ment of the switching time, it is necessary to already switch the monitoring case when
the gantry robot arrives at the point t
Uv
to ensure that the right monitoring case 4 is
active at time t
U
.
The same applies for a movement to the left, i.e., for the switchover to monitoring case
3.
The protective fields of the monitoring cases must overlap 5 to ensure the protective
function is guaranteed at all times.
Time of switching
C
alculating the time of switching
•
The time of switching is calculated using the following equation:
t
UFVz
= t
EVz
+ t
exOVz
+ t
StVz
where
•
t
UFVz
= t
ime by which the switching is advanced
•
t
EVz
= input delay for the control inputs
•
t
exOVz
= delay time due to external OSSDs via EFI = 20 ms
•
t
StVz
= delay time due to external control inputs via EFI (0.5 × basic response time
of the slowest system in the EFI system)
Complementary information
•
In t
he phases before and after switching, only the minimum distances calculated
for the individual monitoring cases apply.
•
The preceding considerations are provided exclusively for the purposes of select‐
ing the optimum switching time.
PROJECT PLANNING 4
8012029/ZA20/2019-11-14 | SICK O P E R A T I N G I N S T R U C T I O N S | S3000 Cold Store
37
Subject to change without notice