OPERATOR’S MANUAL
series Robot Controller
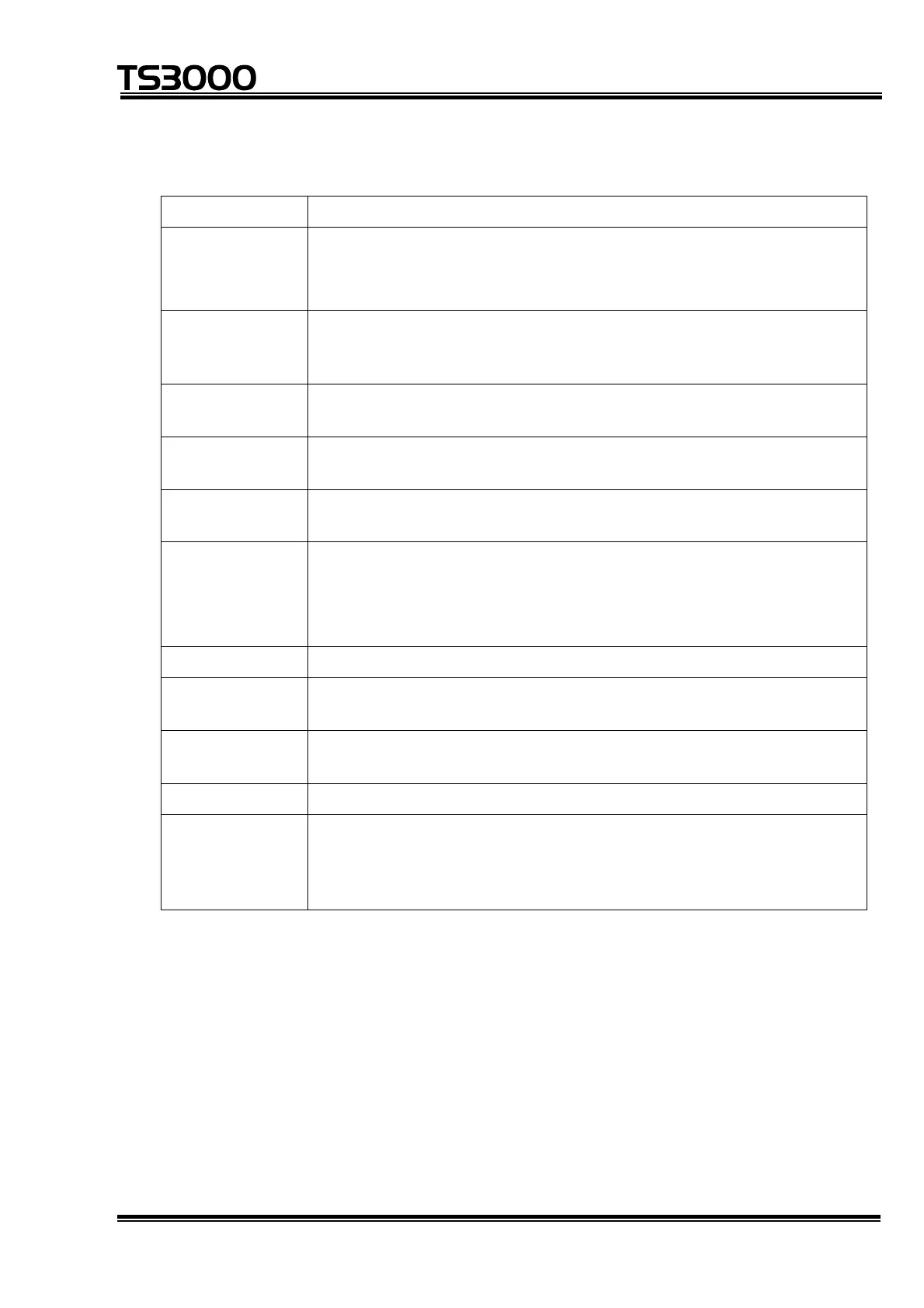
Operations of each command menu are shown below.
Menu Descriptions
[SAVE] Used to save a data and quit the data editor.
(When the data editor was started up from the program editor, the
program editor terminates also.)
[PRG] Used to select the program editor display.
If the data editor was started using [DEDIT], [PRG] is not
displayed on the command menu.
[FULL] Used to select the detailed positional data display. For details,
see Para. 5.3.
[TRANS] Used to select the coordinate data editor display. For details,
see Para. 5.4.
[PYLD] Used to select the load data editor display. For details, see
Para. 5.6.
[NOSAV] Used to quit the editor without saving data. All changed data are
aborted.
(When the data editor was started up from the program editor, the
program editor terminates also.)
[FIND] Used to search a position name. For details, see Para. 5.2.4.
[TEACH] Used to teach a current positional of the robot in a positional data
indicated by the main cursor. For details, see Para. 5.2.
[M–TO] Used to move the robot to a position indicated by the main cursor.
For details, see Para. 5.2
[CUT] Used to select the range select mode. For details, see Para. 5.2
[PASTE] Used to paste the contents saved in the cut buffer (i.e., data
deleted by the previous cut menu) after a positional data indicated
by the main cursor to clear the cut buffer. For details, see Para.
5.2
For details of each command menu, see the descriptions given later.
STE 80720
– 5-6 –
 Loading...
Loading...








