OPERATOR’S MANUAL
series Robot Controller
Section 1 Before Operating Your Robot
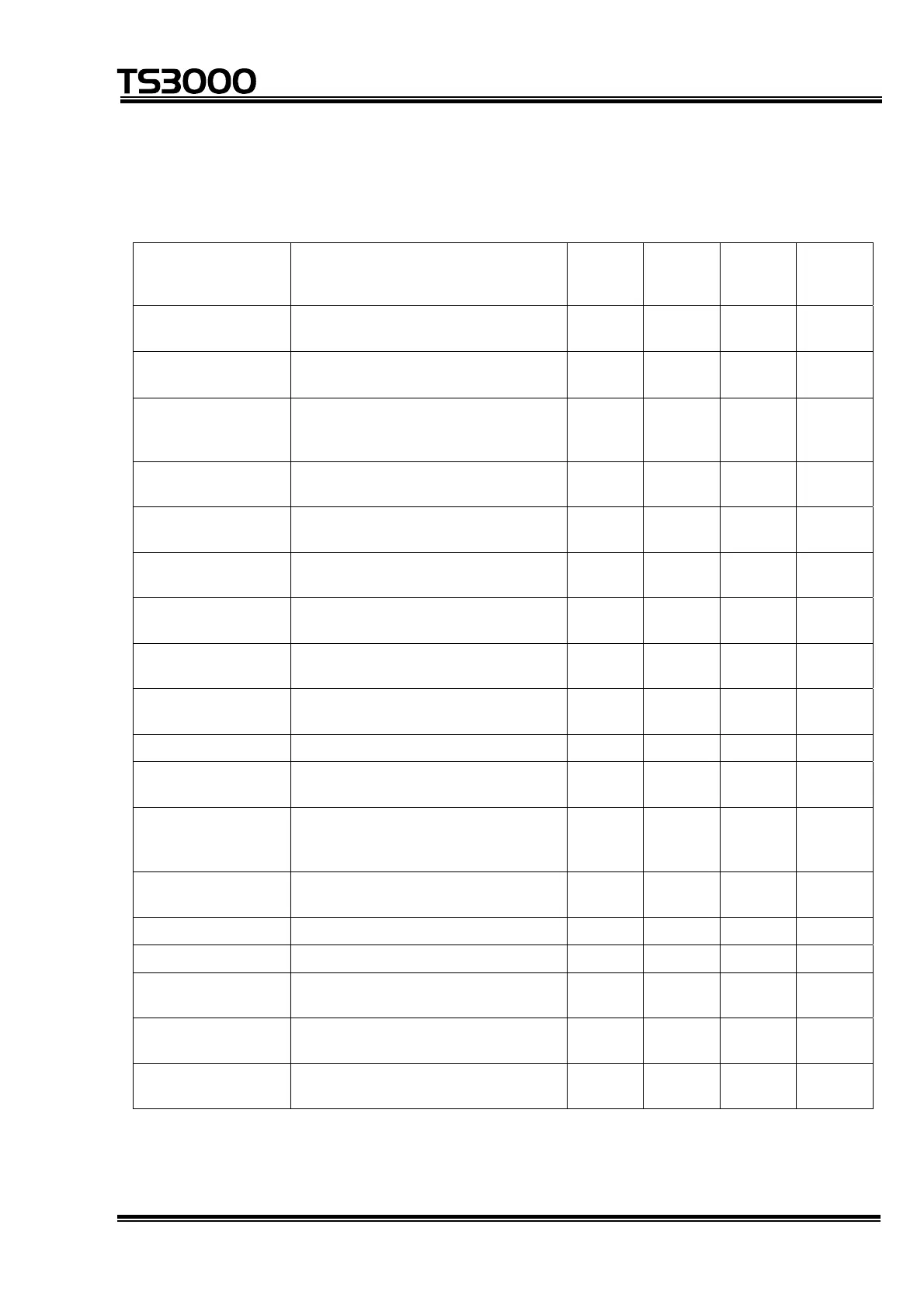
1.1 Overview of Operation Functions
Function Descriptions
Control
panel
Teach
pendant
External
control
signal
HOST
commu-
nication
Main power ON/OFF Used to turn on and off the main
power.
{
Servo power
ON/OFF
Used to turn on and off the servo
driver main circuit power.
{
Δ
(ON only)
{ {
Master mode
selection
Used to select either the external
automatic mode, internal automatic
mode or teaching mode.
{
Start and stop Used to start and stop automatic
operation.
{ { { {
Cycle stop Used to stop automatic operation.
(When 1-cycle operation has finished)
{ { {
Feed hold Used to temporarily stop automatic
operation.
{
{
Emergency stop Used to immediately stop automatic
operation.
{ { { {
Teaching operation Used to manually guide the robot by
jogging or inching.
{
{
Auxiliary signal
operation
Used to operate the pneumatic drive
shaft for grip, etc.
{
Δ
Program editing Used to teach and edit programs.
{
{
Data editing Used to teach and edit positional
data, coordinate data and load data.
{
{
File operation Used to copy into RAM or USB,
rename, delete, etc.
{
Δ
(RAM
only)
Reset Used to reset output signals and
execution environment.
{ { {
Date setting Used to set the system date.
{
Time setting Used to set the system date.
{
Error display Used to display errors which are yet
to be reset.
{ {
{
Error reset Used to reset errors that have been
corrected.
{ {
Error history display Used to display a historical list of
errors which have been corrected.
{
{
STE 80720
– 1-1 –
 Loading...
Loading...








