description of parameters vacon • 79
24-hour support +358 (0)40 837 1150 • Email: vacon@vacon.com
7
1555 KpF1 speed threshold
(2.5.18.16)
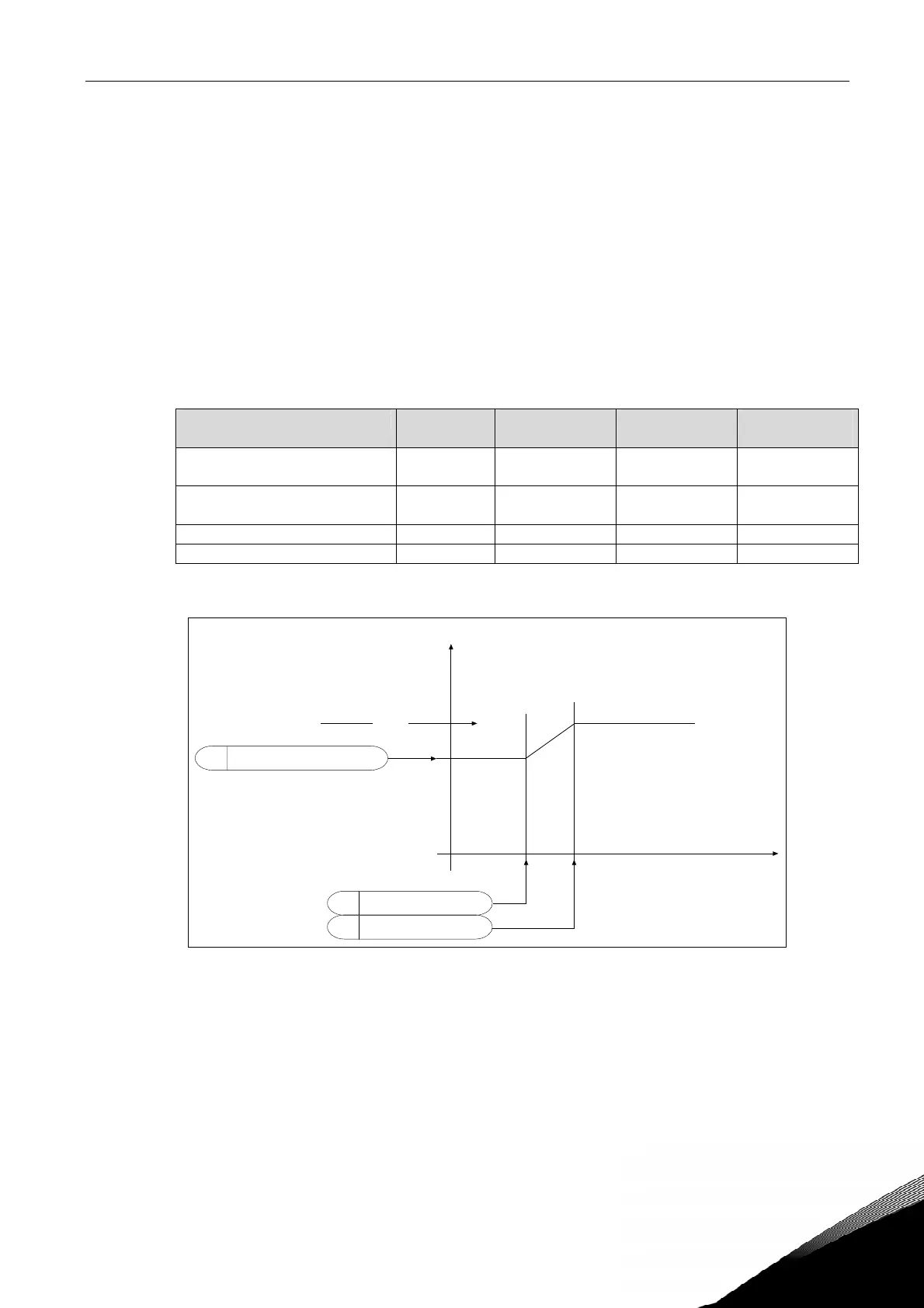
Frequency threshold for transition to normal speed regulator gain, see Figure 28.
1556 KpF0 speed threshold
(2.5.18.17)
Frequency threshold for transition to low speed regulator gain, see Figure 28.
1557 %Kp speed regulator @ F0
(2.5.18.18)
Speed regulator gain at low speed, as a percentage of normal gain (P2.5.17.2 Speed
control Kp, ID 613). See figure 1. A reduced gain at low speed/standstill avoids vibration
when using incremental encoders or resolvers. Resulting gain should be lower than 20
when frequency is lower than a value that depends on encoder pulses/rev. Some
recommended figures are given in Table 38.
Encoder pulses/rev Motor poles Critical speed Recommended
value KpF0
Recommended
value KpF1
256 or resolver with 10 bit
conversion
4 60 rpm 2 Hz 4 Hz
1024 or resolver with 12 bit
conversion
4 15 rpm 0.5 Hz 1 Hz
1024 2 15 rpm 0.25 Hz 0.5 Hz
4096 4 4 rpm 0.13 Hz 0.25 Hz
Table 38. Recommended gain scheduling parameters for example data cases
Figure 28. Scheduling of speed regulator gain at low speed
1602 Brake Opened Acknowledgement
(2.2.5.24)
By using this input the frequency reference is released when this input goes high. The
brake mechanical delay given by P2.3.8.6 is used for releasing of reference if this input is
not used.
1680 Torque reference selection
(2.7.12)
Selector that maps the Torque reference to one process data input channel. Values the
same as in ID1742.
Gain -%
f
100%
W SpeedControl_Kp_f0
W SpeedControl_f0
W SpeedControl_f1