The time stamp is critical because it's used by geo-referencing software to match each laser firing with corresponding data
from an inertial navigation system. The inertial navigation system provides a series of time stamped values for pitch, roll,
yaw, latitude, longitude, and elevation. By matching the time of the data point to the time-stamped data from the INS, the
user's software can mathematically transform the data from the sensor's coordinate frame to an earth-based reference
frame. The time stamps are matched to Universal Coordinated Time (UTC) provided by the GPS/INS.
When the sensor powers up it begins counting microseconds using an internal time reference. However, the sensor can
synchronize its data with UTC time so you can ascertain the exact firing time of each laser in any particular packet.
UTC synchronization requires a user-supplied GPS/INS receiver generating a synchronizing Pulse Per Second (PPS) sig-
nal and an NMEA GPRMC message. The GPRMC message provides minutes and seconds in UTC. Upon syn-
chronization, the sensor reads the minutes and seconds from the GPRMC message and uses the information to set the
sensor’s time stamp to the number of microseconds past the hour, per UTC.
Note: A full description of electrical and timing requirements can be found in
GPS, Pulse Per Second (PPS) and NMEA
GPRMC Message on page 40
. A full description of timing options can be found in
Time Synchronization on page 116
.
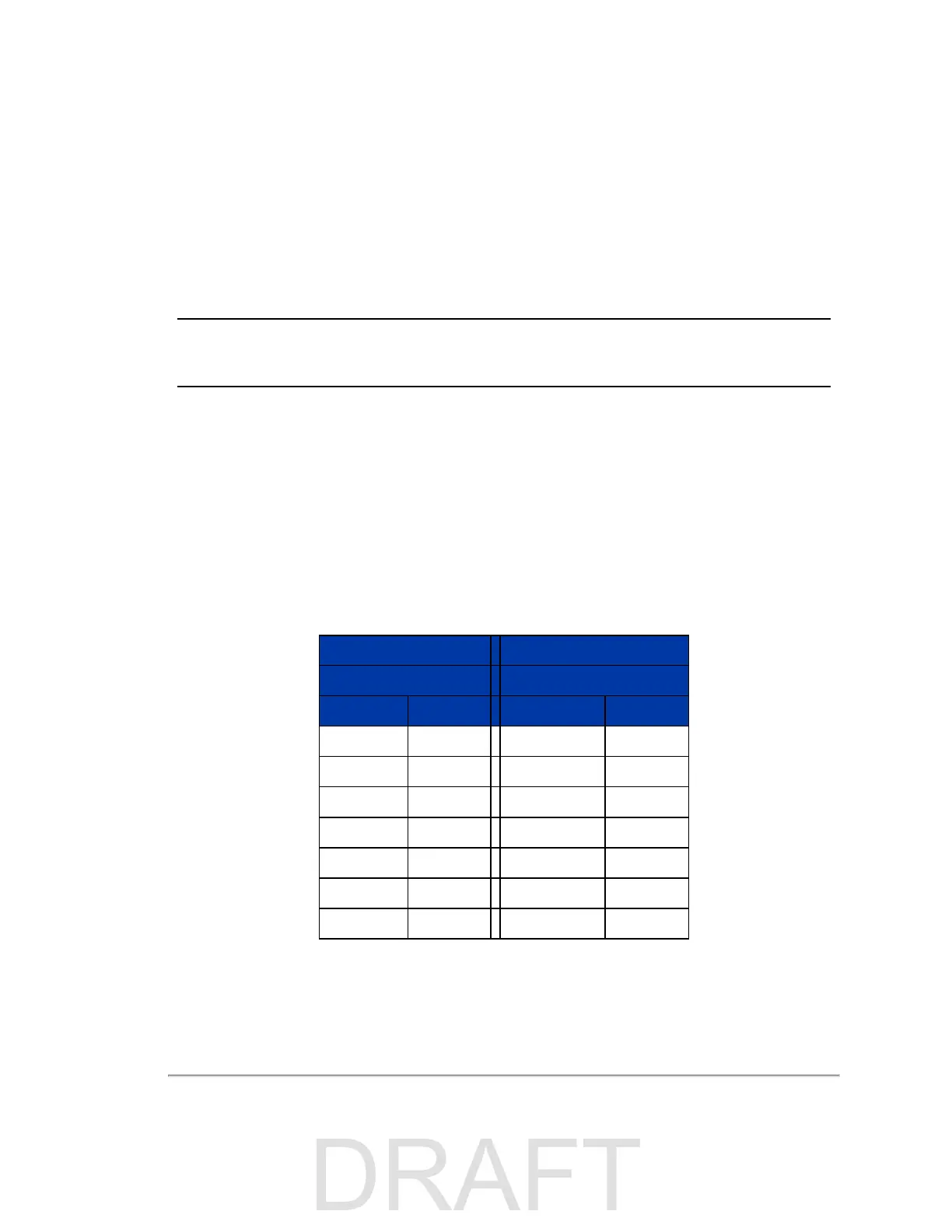
9.3.1.7 Factory Bytes
Every data packet includes a pair of bytes called the Factory Bytes. Their values indicate how azimuths and data points are
organized in the packet. Their packet locations, values, and meanings are specified in
Table 9-1 below
.
The Return Mode byte indicates how the packet’s azimuth and data points are organized. See
Data Packet Structure on
the next page
for details.
Every sensor model line has its lasers arrayed vertically at slightly different angles. Use the Product ID byte to identify the
correct set of vertical (or elevation) angles. Product IDs are not unique and may be shared by different sensors. For
example, per
Table 9-1 below
, the VLP-16 and Puck LITE share the same elevation angles. Hence, the two products
share the same Product ID. Conversely, the Puck Hi-Res has a different Product ID since it has a different set of elevation
angles.
Return Mode Product ID
Offset in packet: 0x04DE Offset in packet: 0x04DF
Mode Value Product Model Value
Strongest 0x37 (55) HDL-32E 0x21 (33)
Last Return 0x38 (56) VLP-16 0x22 (34)
Dual Return 0x39 (57) Puck LITE 0x22 (34)
-- -- Puck Hi-Res 0x24 (36)
-- -- VLP-32C 0x28 (40)
-- -- Velarray 0x31 (49)
-- -- VLS-128 0xA1 (161)
Table 9-1 Factory Byte Values
Chapter 9 • Sensor Data 55

 Loading...
Loading...


