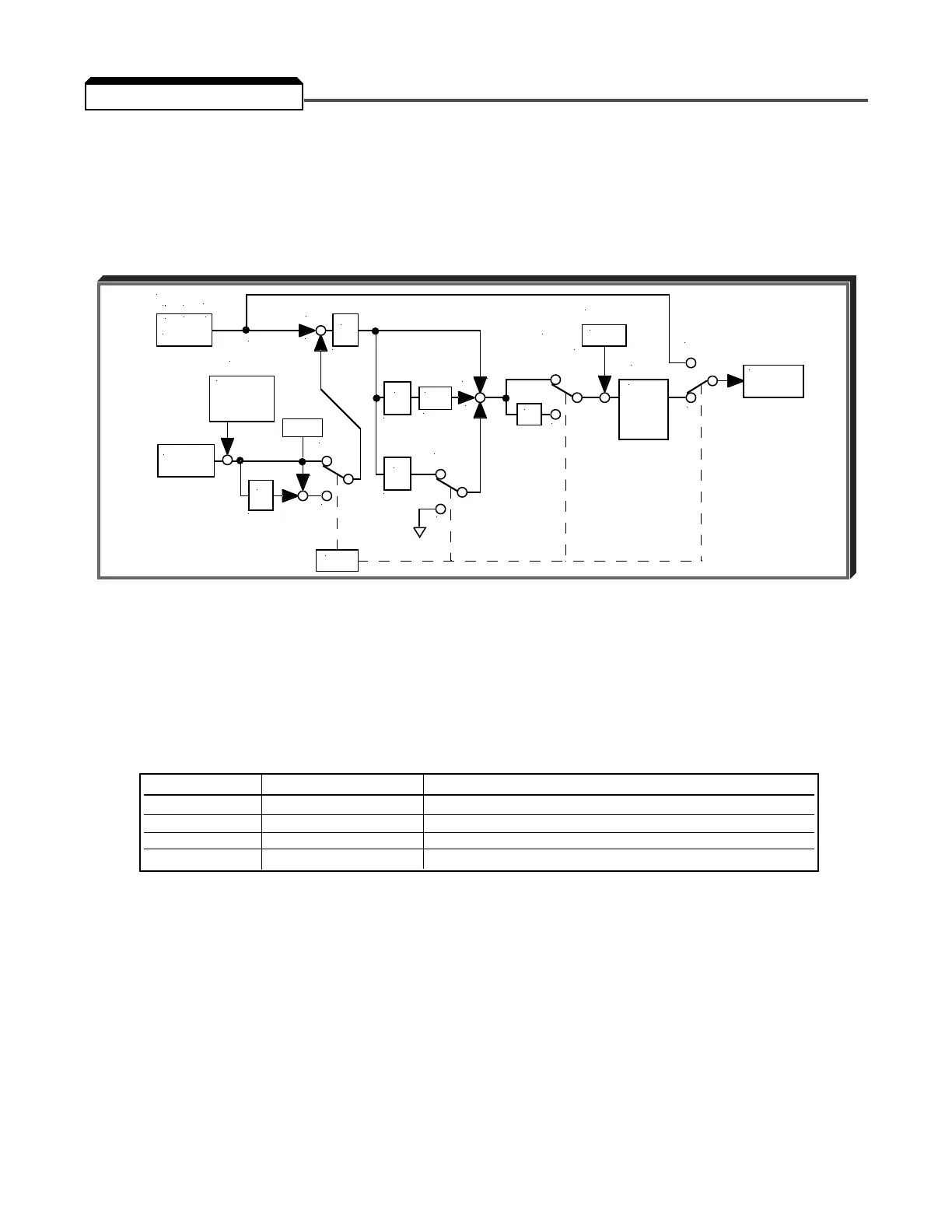
The Proportional, Integral and Derivative control function provides closed-loop control, or
regulation, of a system process variable (pressure, temperature, etc.). This regulation is
accomplished by comparing a feedback signal to a setpoint reference, which results in an
error signal. The PID control algorithm then performs calculations, based upon the PID
parameter settings (n084 thru n092 ), on this error signal. The result of the PID
algorithm is then used as the new speed reference.
A. n084 : PID Selection
(PID Mode)
Using this parameter, PID control can be enabled, feed forward function can be activated, or
the PID Feedback can be inverted.
5-45
5.22 PID CONTROL
U-13
LED Setting LCD Setting Description
0 * Disabled* PID disabled
1 Enabled D=Fdbk PID enabled (Deviation is D-controlled)
2 Enabled D=Fwd PID with feed forward (Feedback value is D-controlled
3 Enabled Rev Fdbk Inverted PID Feedback signal

 Loading...
Loading...


