NoteAction
xx1900002085
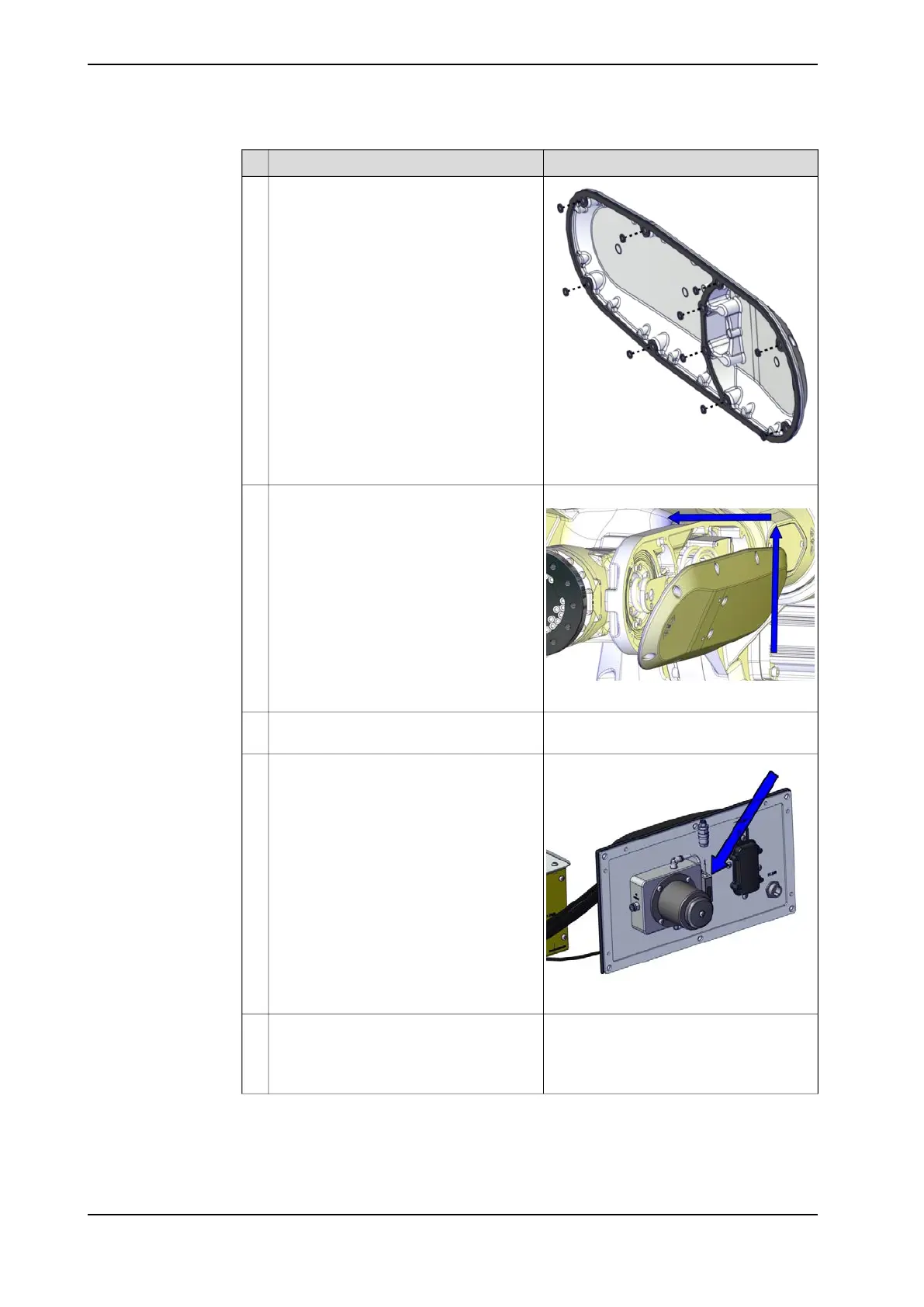
• Make sure that the gasket is undam-
aged on the cover. Replace com-
plete cover, if gasket is damaged.
• Put washers in the holes of the gas-
ket.
• Use attachment screws made of
stainless steel to fit the wrist cover.
2
Tightening torque: 10 Nm.
xx1300000772
Refit the wrist cover. In order not to dam-
age the cable harness when the wrist cover
is refitted, use this method:
1 Hold the cover slightly tilted below
the wrist.
2 Put the cable harness inside the
cover.
3 Lift the cover, still tilted.
4 Move the upper part of the cover into
position.
5 Secure the cover with its attachment
screws.
3
Turn on the air pressure supply to the
overpressure system.
4
xx1700001593
Check the leak flow value on the flow
sensor and compare it to the initial value.
The value should be the same.
If the value is higher than the initial value,
fault trace according to Inspecting the leak
flow (overpressure unit) in the system on
page 128.
5
Axis Calibration is described in Calibrating
with Axis Calibration method on page 623.
Re-calibrate the robot.6
General calibration information is included
in section Calibration on page 613.
Continues on next page
238 Product manual - IRB 6790
3HAC063331-001 Revision: B
© Copyright 2019 - 2020 ABB. All rights reserved.
4 Repair
4.4.2 Refitting the cable harness
Continued