Position of the robot in the continued process
NoteAction
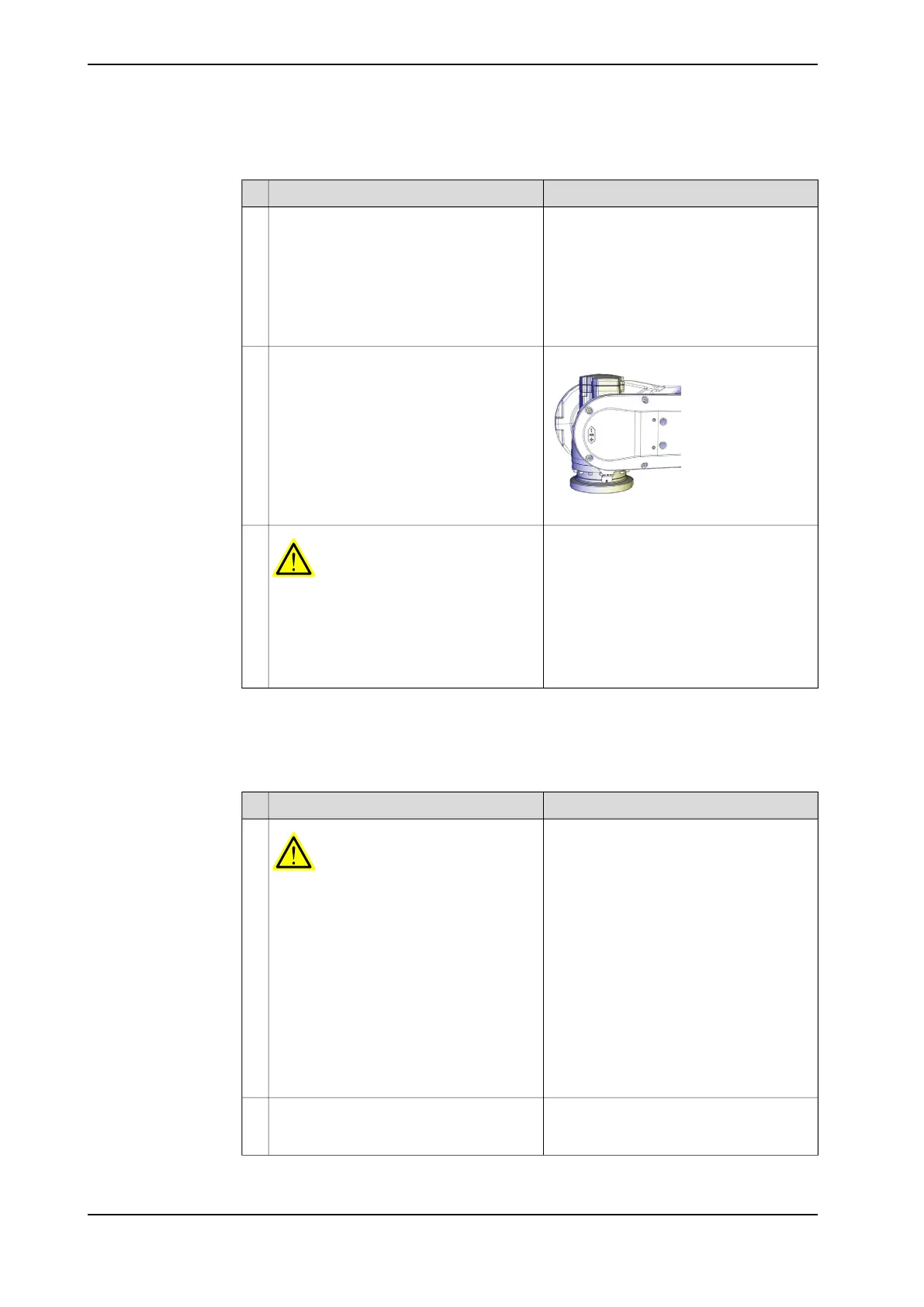
Jog the robot to:
• Axis 1: 0°
• Axis 2: 0°
• Axis 3: 0°
• Axis 4: 0°
• Axis 5: +90°
• Axis 6: 0°
1
24 VDC power supply
xx1200001081
Connect the 24 VDC power supply, release
the brakes and move the axis 5 manually
into +90°.
Connect to R2.MP5-connector:
• + = pin 2
• - = pin 5
2
DANGER
Turn off all:
• electric power supply
• hydraulic pressure supply
to the robot, before entering the safe-
guarded space.
3
Unloading or locking the balancing device springs
Use this procedure to unload the balancing device with the help of the robot, and
lock the balancing device springs in a compressed position, using the Distance
tool (3HAC030662-001).
NoteAction
DANGER
Do not use the Distance tool (3HAC030662-
001) to unload or restore the pressure of
the balancing device springs! This tool is
only used to lock the spring unit in a com-
pressed position, after axis-2 has been
jogged to -30° or +30°. Fitting and removal
of the tool shall only be done with axis-2 in
this position!
To unload or restore a new balancing
device or if the spring unit of the balancing
device cannot be compressed by jogging
the robot, only use the Hydraulic press tool,
balancing device (3HAC020902-001).
1
This is done in order to compress the bal-
ancing device springs inside the balancing
device before fitting the Distance tool.
Jog axis-2 to:
• -30° or +30°
2
Continues on next page
320 Product manual - IRB 6790
3HAC063331-001 Revision: B
© Copyright 2019 - 2020 ABB. All rights reserved.
4 Repair
4.5.4 Replacing the lower arm
Continued
 Loading...
Loading...

