NoteAction
DANGER
Turn off all:
• electric power supply
• hydraulic pressure supply
to the robot, before entering the robot
working area.
3
xx1300000554
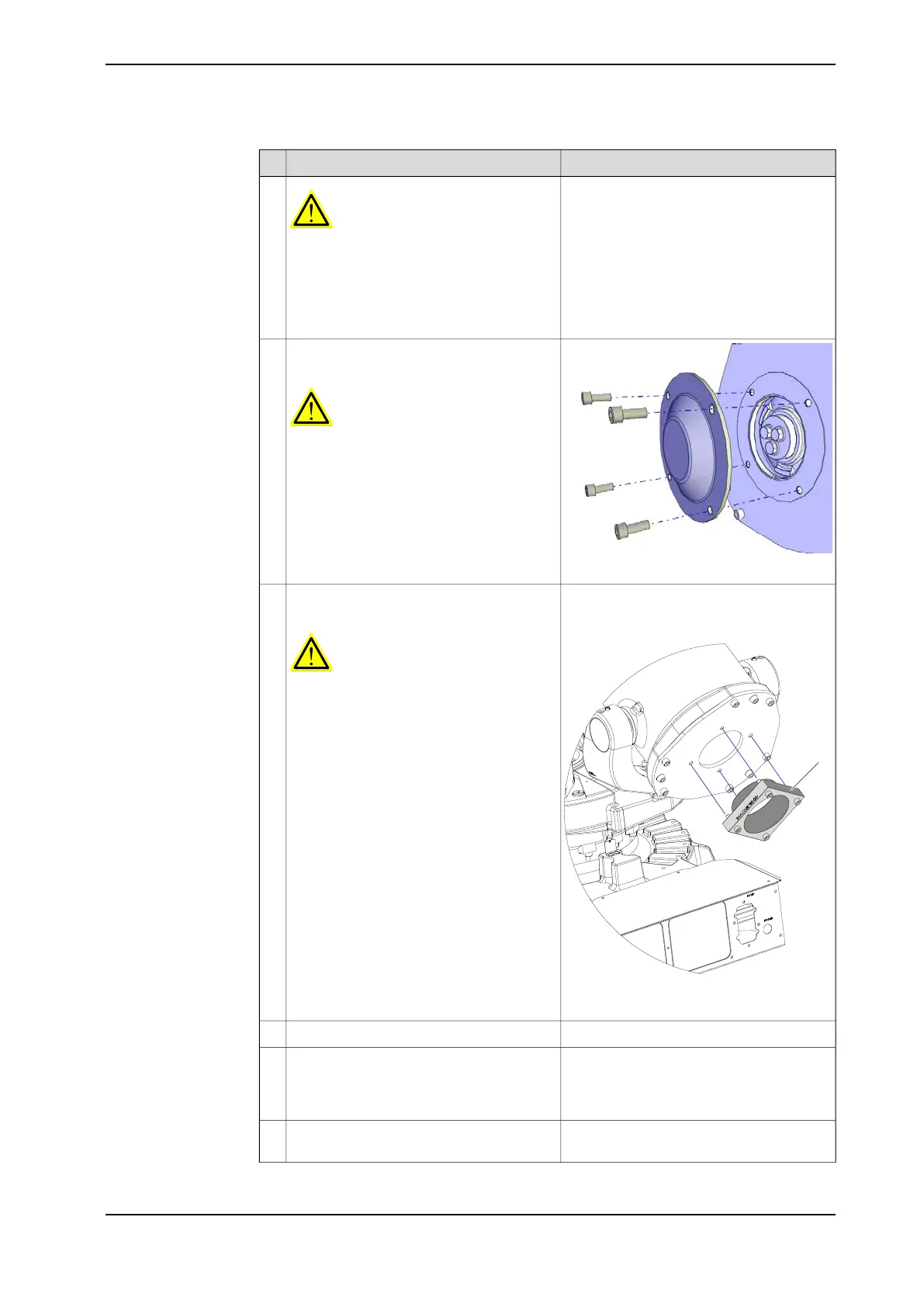
Remove the cover plate on the back of the
balancing device.
DANGER
DO NOT remove any other screws than the
rear cover attachment screws.
4
Tightening torque: 45 NmFit the Distance tool on the back of the
balancing device using the four screws.
DANGER
Use caution when tightening the screws.
The threads in the cover can be damaged
if more tightening torque than 45 Nm is
used, risking that the Distance tool is not
properly fitted.
5
Attachment screws: M10x30 Stainless Steel
(3HAC060786-020) (4 pcs)
xx0800000480
A Distance tool: 3HAC030662-001
Turn the power on temporary.6
This is done to compress the balancing
device springs, making it possible to re-
move the front shaft of the balancing
device.
Jog axis-2 to the calibration position.
The balancing device is now unloaded.
7
Let the Distance tool stay fitted during the
continued procedure.
8
Continues on next page
Product manual - IRB 6790 321
3HAC063331-001 Revision: B
© Copyright 2019 - 2020 ABB. All rights reserved.
4 Repair
4.5.4 Replacing the lower arm
Continued
 Loading...
Loading...

