Concluding procedure
NoteAction
xx1500001672
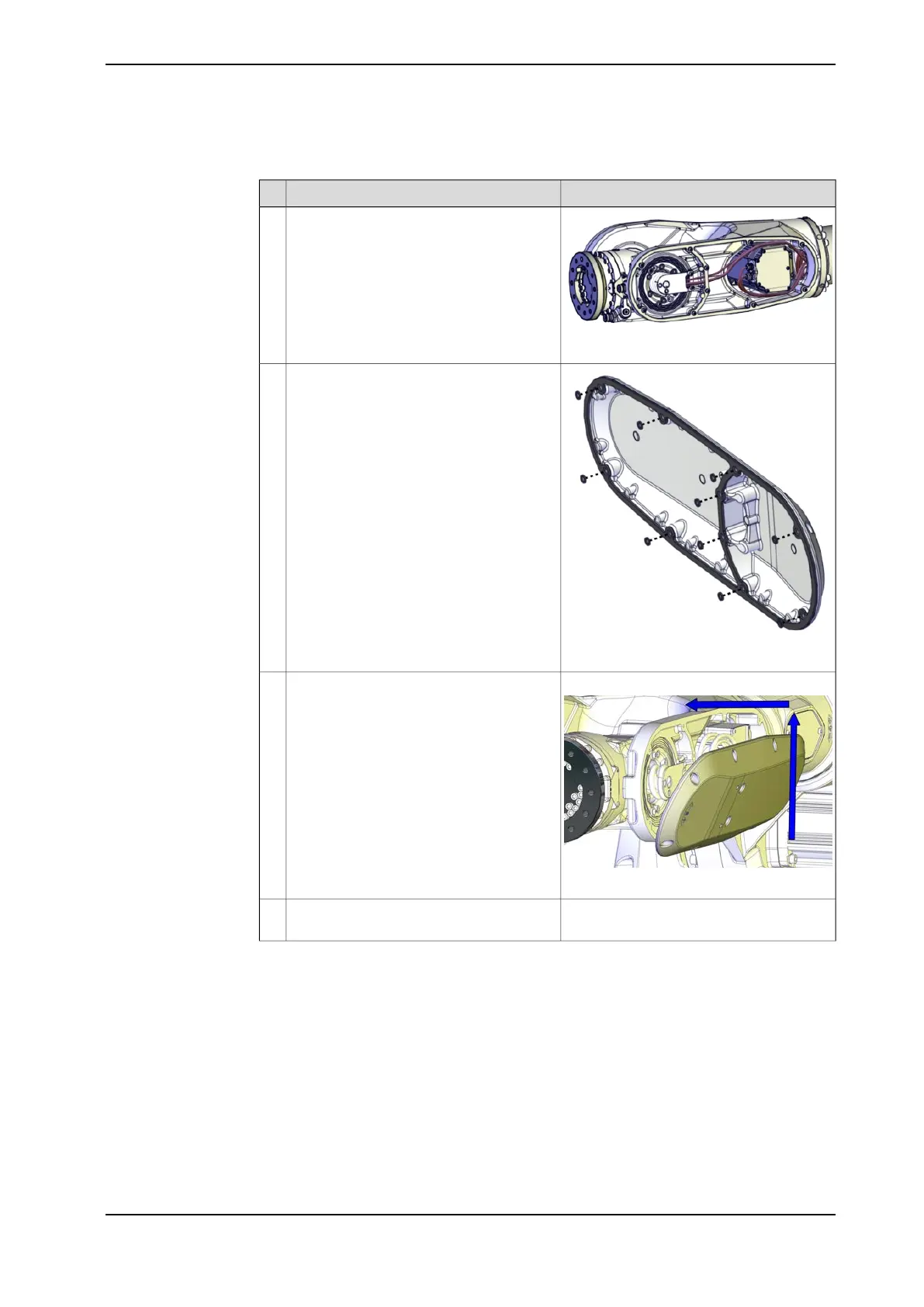
Make sure that the cable harness is placed
in a way that it will not be damaged when
the wrist cover is fitted.
1
xx1900002085
• Make sure that the gasket is undam-
aged on the cover. Replace com-
plete cover, if gasket is damaged.
• Put washers in the holes of the gas-
ket.
• Use attachment screws made of
stainless steel to fit the wrist cover.
2
Tightening torque: 10 Nm
xx1300000772
Refit the wrist cover. In order not to dam-
age the cable harness when the wrist cover
is refitted, use this method:
1 Hold the cover slightly tilted below
the wrist.
2 Put the cable harness inside the
cover.
3 Lift the cover, still tilted.
4 Move the upper part of the cover into
position.
5 Secure the cover with its attachment
screws.
3
Turn on the air pressure supply to the
overpressure system.
4
Continues on next page
Product manual - IRB 6790 485
3HAC063331-001 Revision: B
© Copyright 2019 - 2020 ABB. All rights reserved.
4 Repair
4.7.5 Replacing the axis-5 motor
Continued
 Loading...
Loading...

