Concluding procedure
NoteAction
Turn on the power to the robot and jog to:
• axis 1 = -5°
• axis 2 = +10°
1
DANGER
Turn off all:
• electric power supply
• hydraulic pressure supply
to the robot, before entering the robot
working area.
2
See Filling oil into the axis-1 gearbox on
page 134.
Refill oil in the gearbox.3
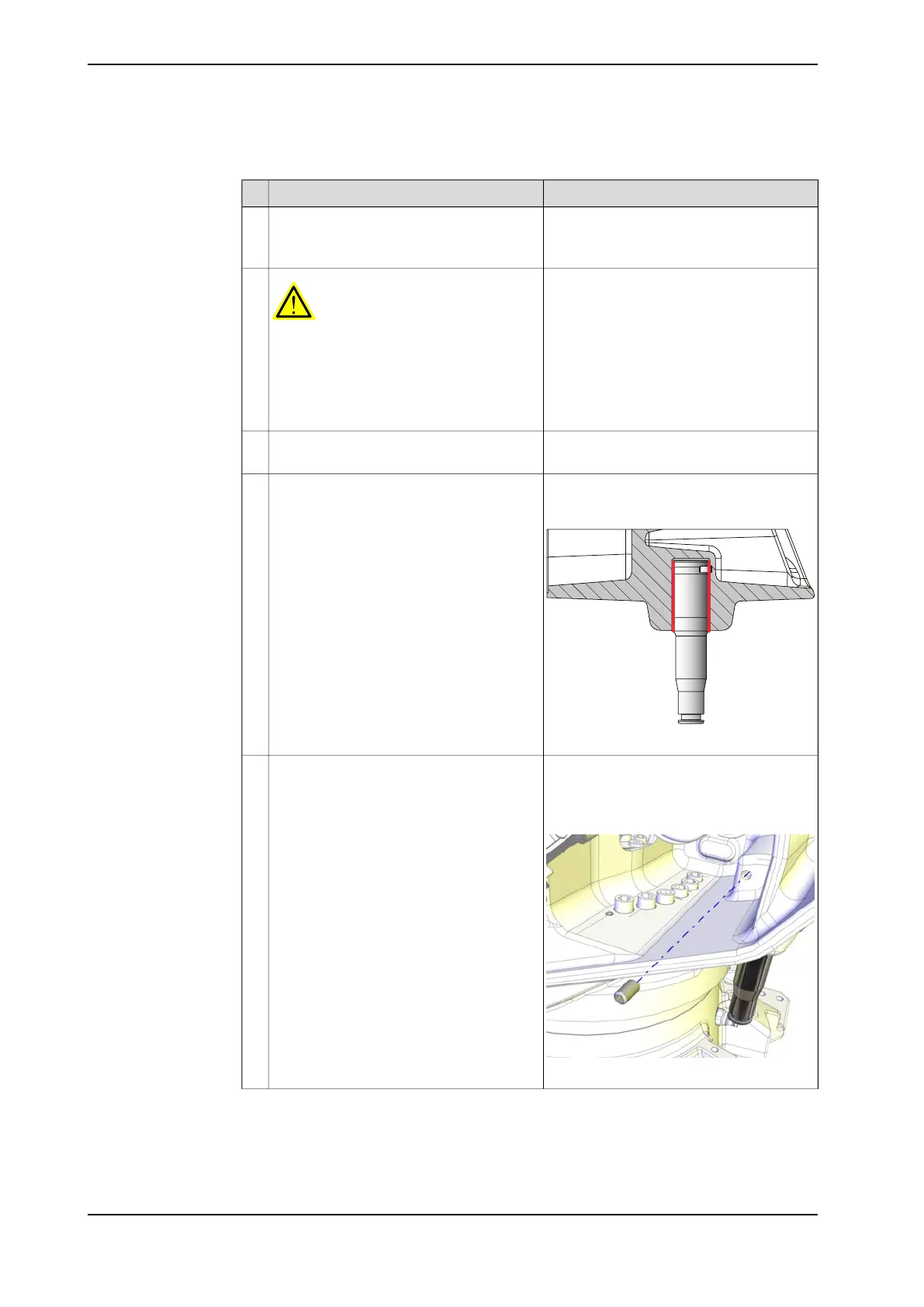
Rust preventive: 3HAC034903-001 (Mer-
casol 3110 Waxcoat. Recommended drying
time is 24h.).
xx1400000378
Apply Mercasol on the surfaces shown in
the figure, on stop pin and in the hole as
shown in the figure.
4
Screw: M10x20 Stainless Steel
(9ADJ400914P1259)
Refit the mechanical stop pin and secure
it with the attachment screw.
5
Locking liquid: 3HAB7116-1 (Loctite 243).Apply locking liquid on the screw.
Tightening torque: 24 Nm
xx1300000476
Continues on next page
540 Product manual - IRB 6790
3HAC063331-001 Revision: B
© Copyright 2019 - 2020 ABB. All rights reserved.
4 Repair
4.8.1 Replacing the axis-1 gearbox
Continued
 Loading...
Loading...

