Actual signals and parameters 243
3010 STALL
FUNCTION
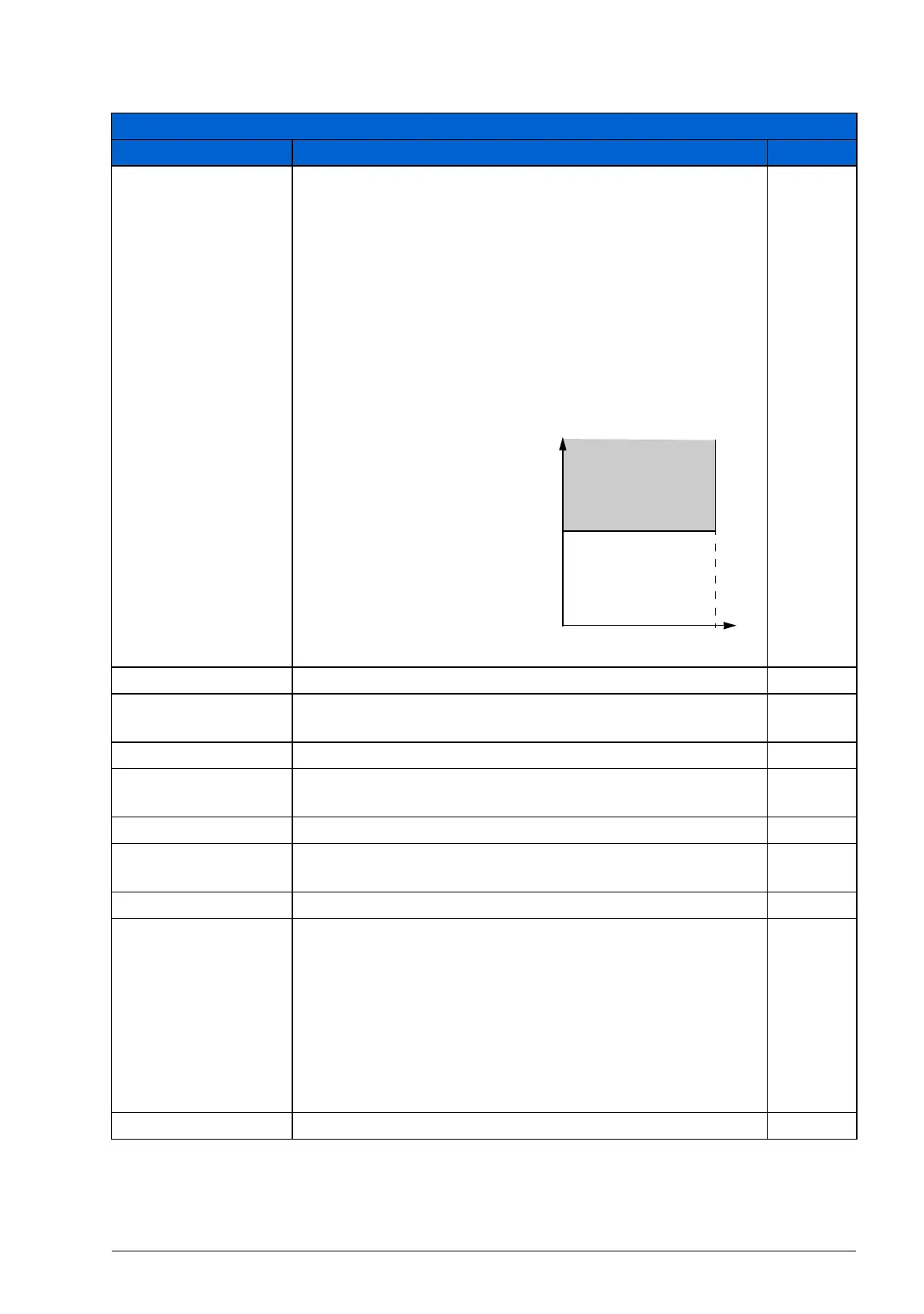
Selects how the drive reacts to a motor stall condition. The
protection wakes up if the drive has operated in a stall
region (see the figure below) longer than the time set by
parameter 3012 STALL TIME.
In vector control the user defined limit = 2017 MAX
TORQUE 1 / 2018 MAX TORQUE 2 (applies for positive
and negative torques).
In scalar control the user defined limit = 2003 MAX
CURRENT.
The control mode is selected by parameter 9904 MOTOR
CTRL MODE.
NOT SEL
NOT SEL Protection is inactive. 0
FAULT The drive trips on fault MOTOR STALL (0012) and the
motor coasts to stop.
1
ALARM The drive generates alarm MOTOR STALL (2012). 2
3011 STALL
FREQUENCY
Defines the frequency limit for the stall function. See
parameter 3010 STALL FUNCTION.
20.0 Hz
0.5…50.0 Hz Frequency 1 = 0.1 Hz
3012 STALL TIME Defines the time for the stall function. See parameter 3010
STALL FUNCTION.
20 s
10…400 s Time 1 = 1 s
3013 UNDERLOAD
FUNC
Selects how the drive reacts to underload. The protection
wakes up if:
• the motor torque falls below the curve selected by
parameter 3015 UNDERLOAD CURVE,
• output frequency is higher than 10% of the nominal motor
frequency and
• the above conditions have been valid longer than the time
set by parameter 3014 UNDERLOAD TIME.
NOT SEL
NOT SEL Protection is inactive. 0
All parameters
No. Name/Value Description Def/FbEq
Torque (%) /
Current (A)
0.95
·
User defined limit
Stall region
Par. 3011
f