46 Program features
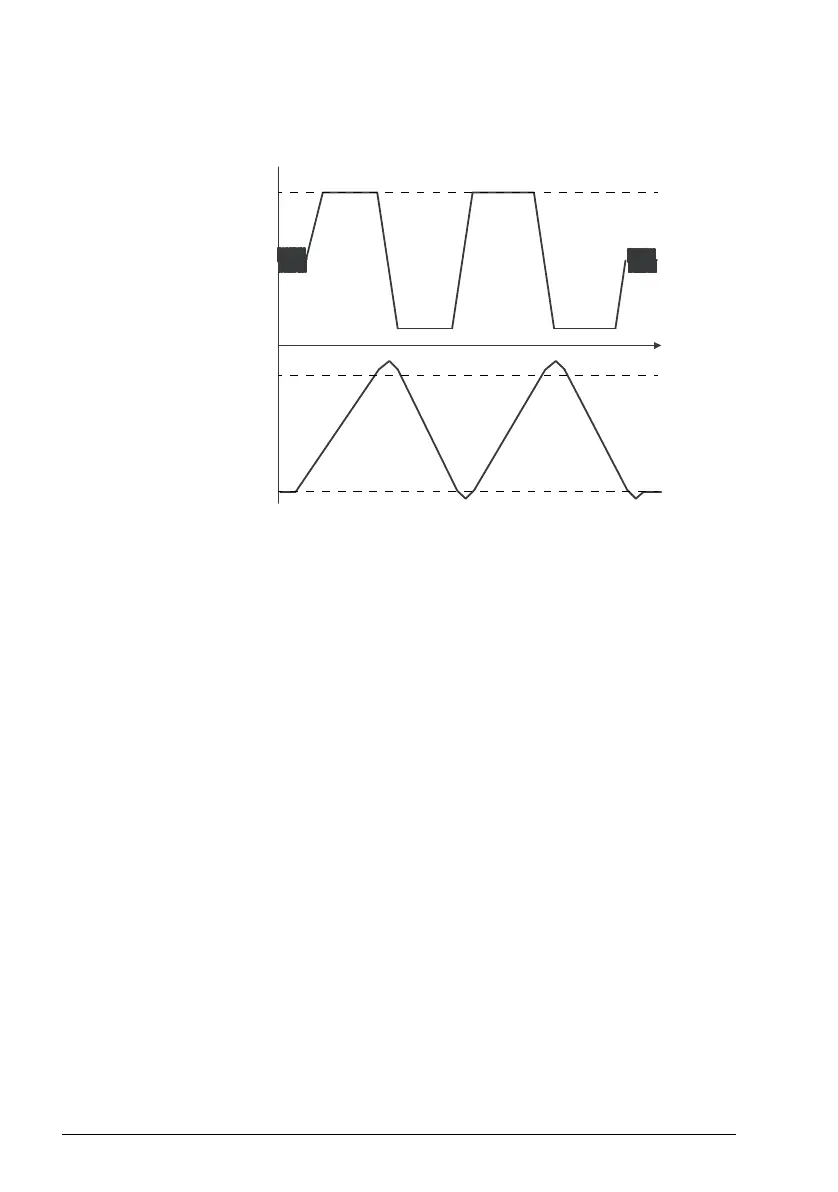
The diagram below shows the behavior of speed and torque during the autotune
routine. In this example, 25.40 is set to 2.
Notes:
• If the drive cannot produce the requested braking power during the routine, the
results will be based on the acceleration stages only, and not as accurate as with
full braking power.
• The motor will exceed the calculated maximum speed slightly at the end of each
acceleration stage.
Before activating the autotune routine
The prerequisites for performing the autotune routine are:
• The motor identification run (ID run) has been successfully completed
• Speed and torque limits (parameter group 30 Limits) have been set
• The drive has been started and is running in speed control mode.
After these conditions have been fulfilled, autotuning can be activated by parameter
25.33 (or the signal source selected by it).
Autotune modes
Autotuning can be performed in three different ways depending on the setting of
parameter 25.34. The selections Smooth, Normal and Tight define how the drive
torque reference should react to a speed reference step after tuning. The selection
Smooth will produce a slow but robust response; Tight will produce a fast response
Initial torque + [25.38]
t
Initial torque
Initial speed + [25.39]
Initial speed