Program features 47
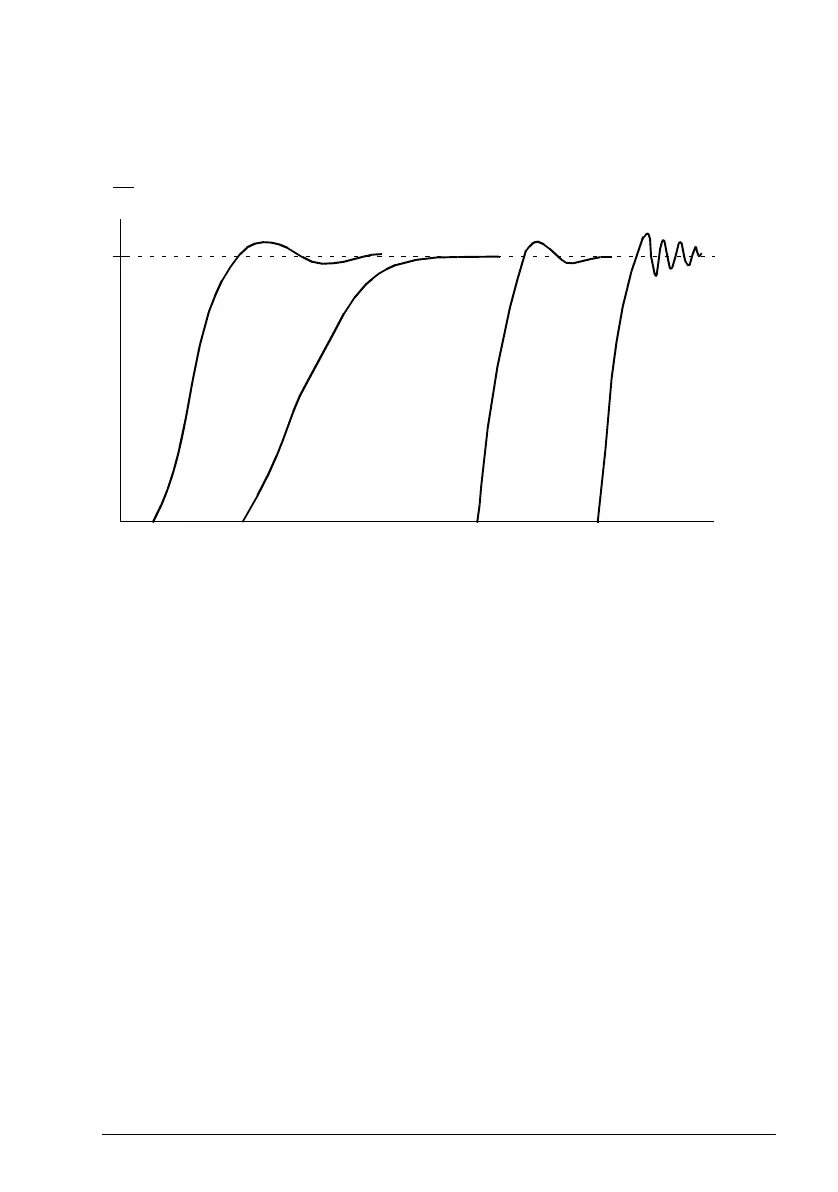
but possibly too high gain values for some applications. The figure below shows
speed responses at a speed reference step (typically 1…20%).
Autotune results
At the end of a successful autotune routine, its results are automatically transferred
into parameters
• 25.02 (proportional gain of the speed controller)
• 25.03 (integration time of the speed controller)
• 25.37 (mechanical time constant of the motor and machine).
Nevertheless, it is still possible to manually adjust the controller gain, integration time
and derivation time.
%
t
n
C
B
D
n
N
A
A: Undercompensated
B: Normally tuned (autotuning)
C: Normally tuned (manually). Better dynamic performance than with B
D: Overcompensated speed controller