DESCRIPTION
The robot consists of a manipulator and a control unit connected by 2 cables.
Various options and variants are available. These are described in detail in chapter 6.
The control unit contains the total system electronics, and offers many
opportunities for external communication and control of peripheral equipment.
Operator communication, programming and manual running is performed via a
portable programming unit. Programming can also be performed off-line via a
terminal and an ABB Robotics Off-line Programming Package.
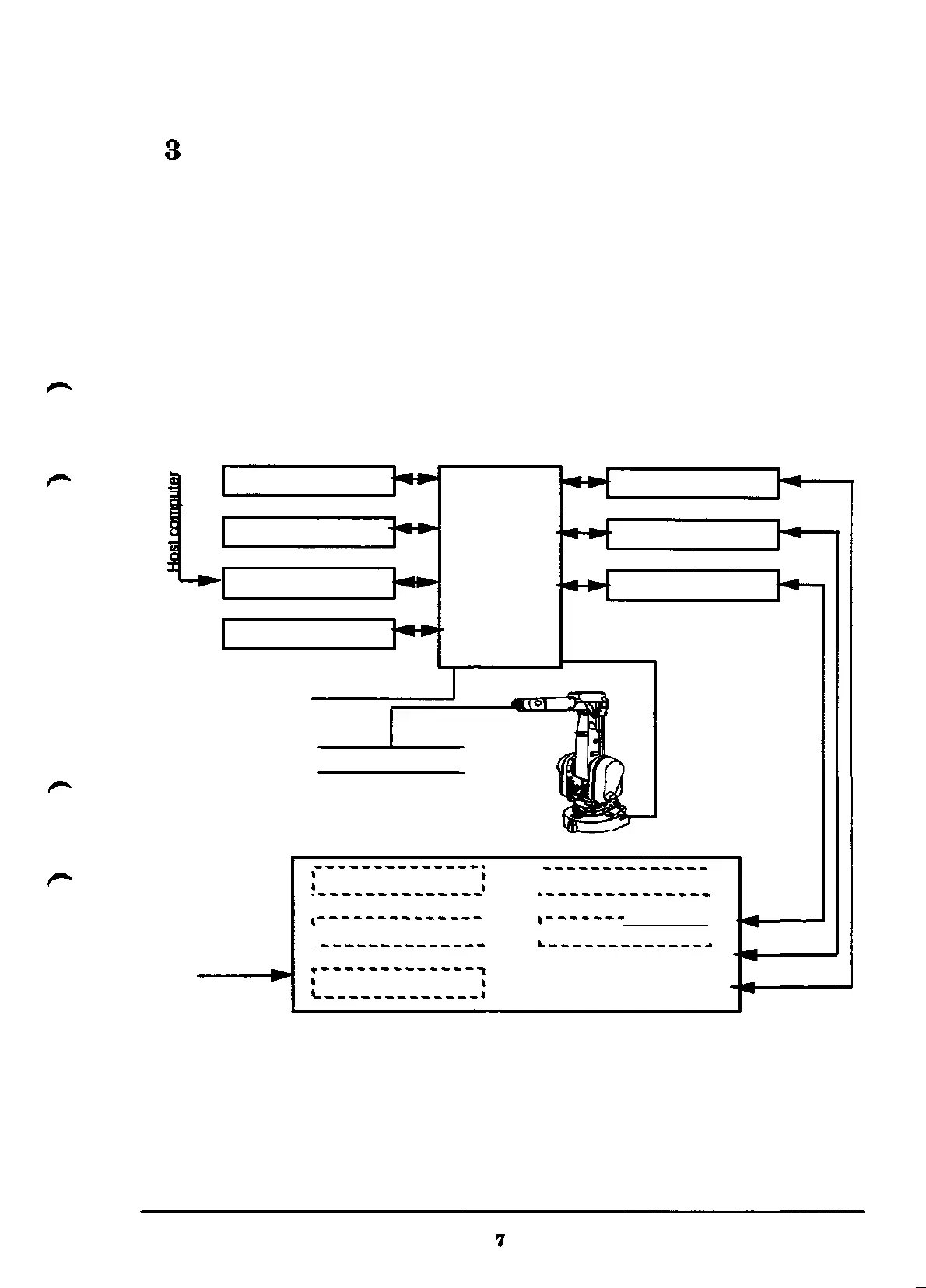
CONTROL UNIT
Programming unit
Floppy disk unit
Computer link
Printout
Power
supply
Power
supply
External I/O
External axes
Track motion
\ Tool interface j
Manipulator
PERIPHERAL EQUIPMENT AND TOOLS
Conveyer
i Tool system 2000 !
Etc.
1
1
1
1
1
>
1
Fig. 3.1 Principle diagram 1KB 2000
Description
1KB 2000