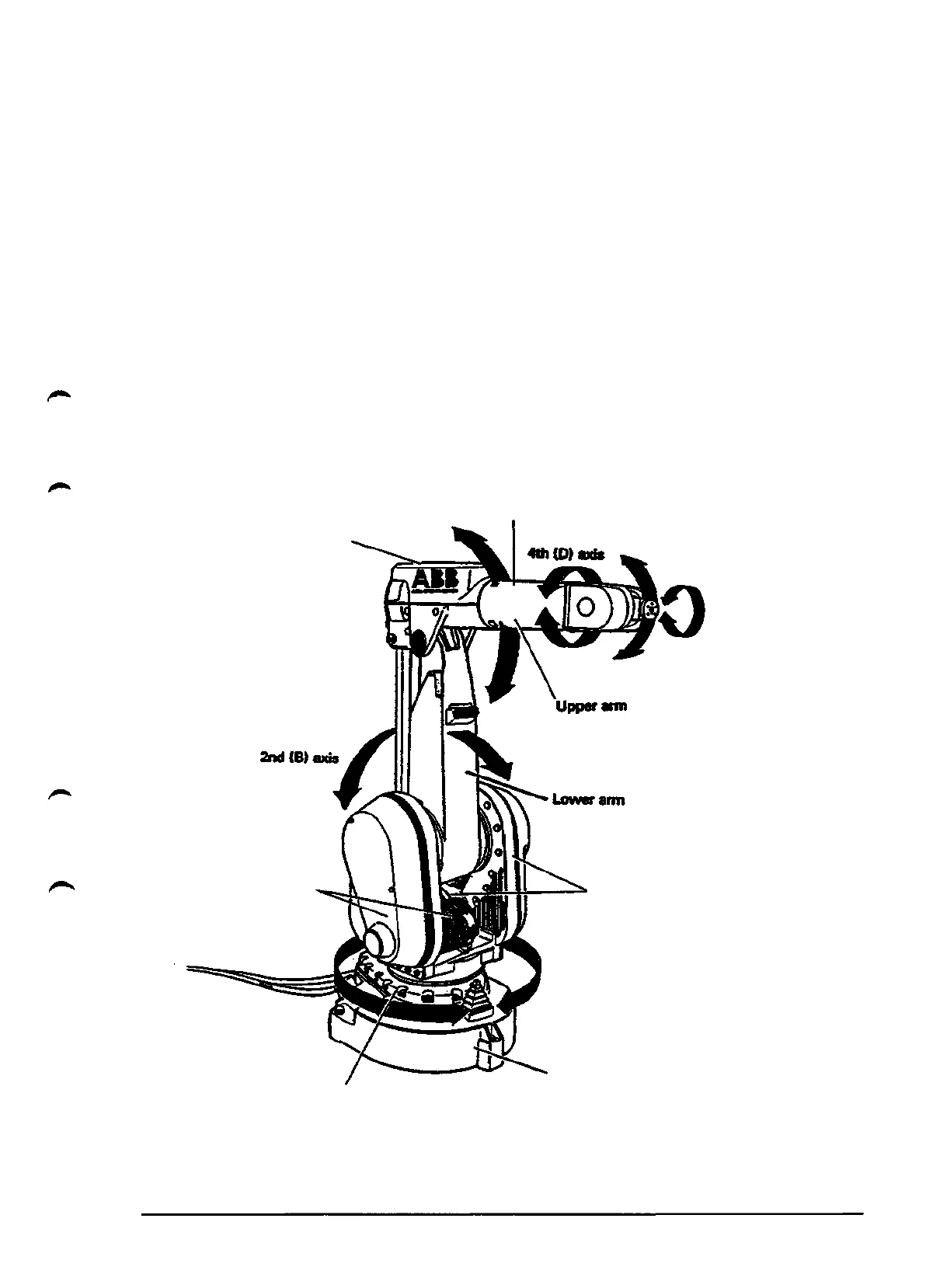
Movement structure
The robot's movement pattern can briefly be described as follows (see also the
figure below).
Axisl(C)
Turning of the complete mechanical unit arm system.
Axis 2 (B)
Forward and reverse movement of the lower arm.
Axis 3 (A)
Up and down movement of the upper arm.
Axis 4 (D)
Turning of the complete wrist centre.
Axis 5 (E)
Bending of wrist around the wrist centre.
Axis 6 (P)
Turning of mounting flange (robot turning disc)
3rd (A) axis
Motor unit Sth and
6th axes
Motor unit 4th axis
6th (E) axis
6th (PJ axis
Wrist
Motor unit and
gear box 3rd axis
Motor unit and
gear box 2nd axis
1st <C) axis
Base
Gear box 1st axis
Description
1KB 2000
9