36 G12 OEM Board & Sensor Reference Manual
Real-time differential operation requires a communication link between the base
and rover receivers. A wireless link, such as a radio-modem link or cellular/
modem link is typically used, although any other medium that can transfer digital
data can be used.
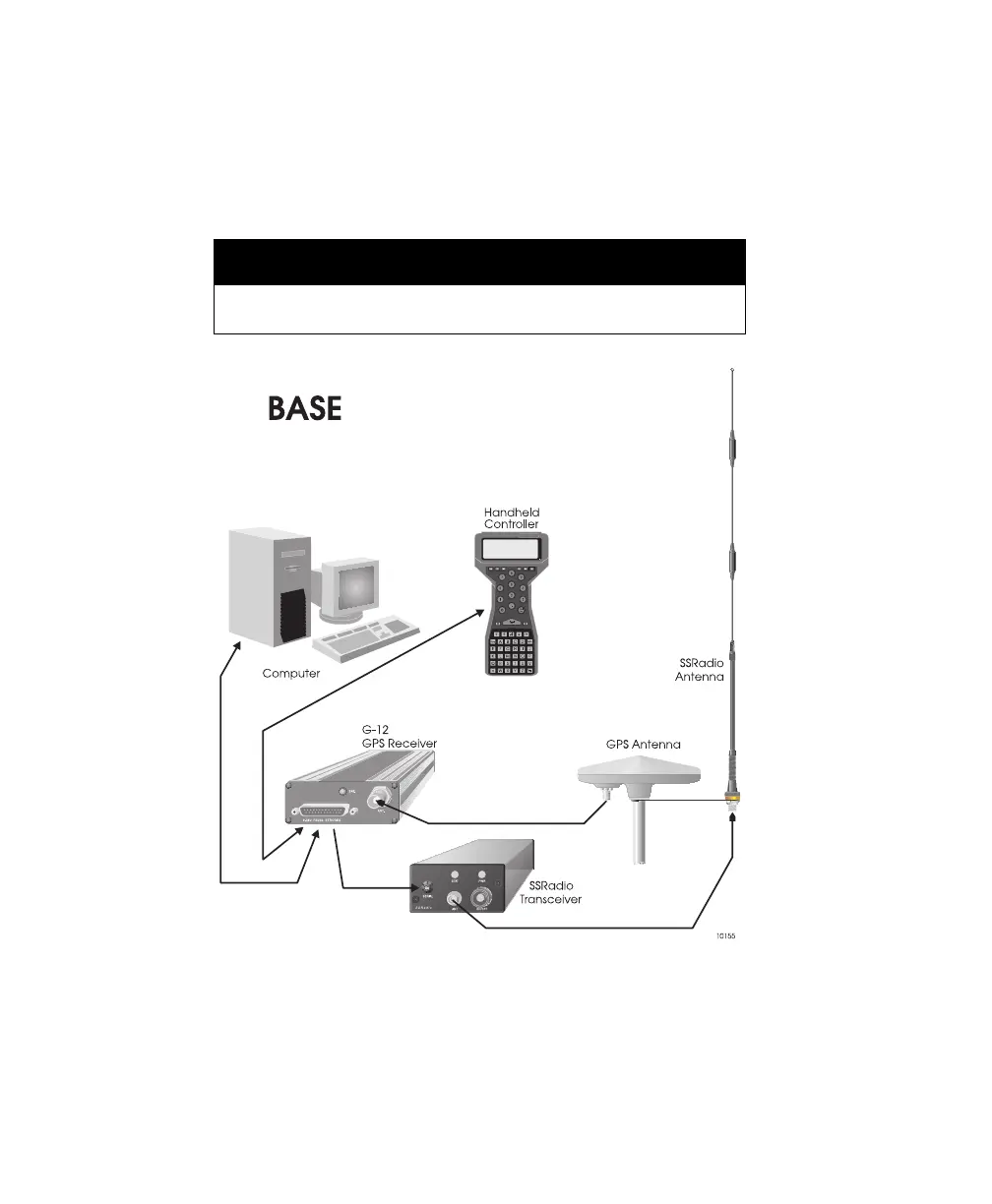
Figure 3.1 and Figure 3.2 display a typical DGPS base station and remote system
configuration.
CAUTION
Errors in the base station reference position will be duplicated in
positions computed by the remote system.
Figure 3.1. RTCM Base Station System
G12RevD.book Page 36 Tuesday, April 2, 2002 4:33 PM