Asycube - Asyril SA
Programming Guide
15/83
3.1.5. Modbus TCP connection with the Asycube, configuration with
Asycube HMI
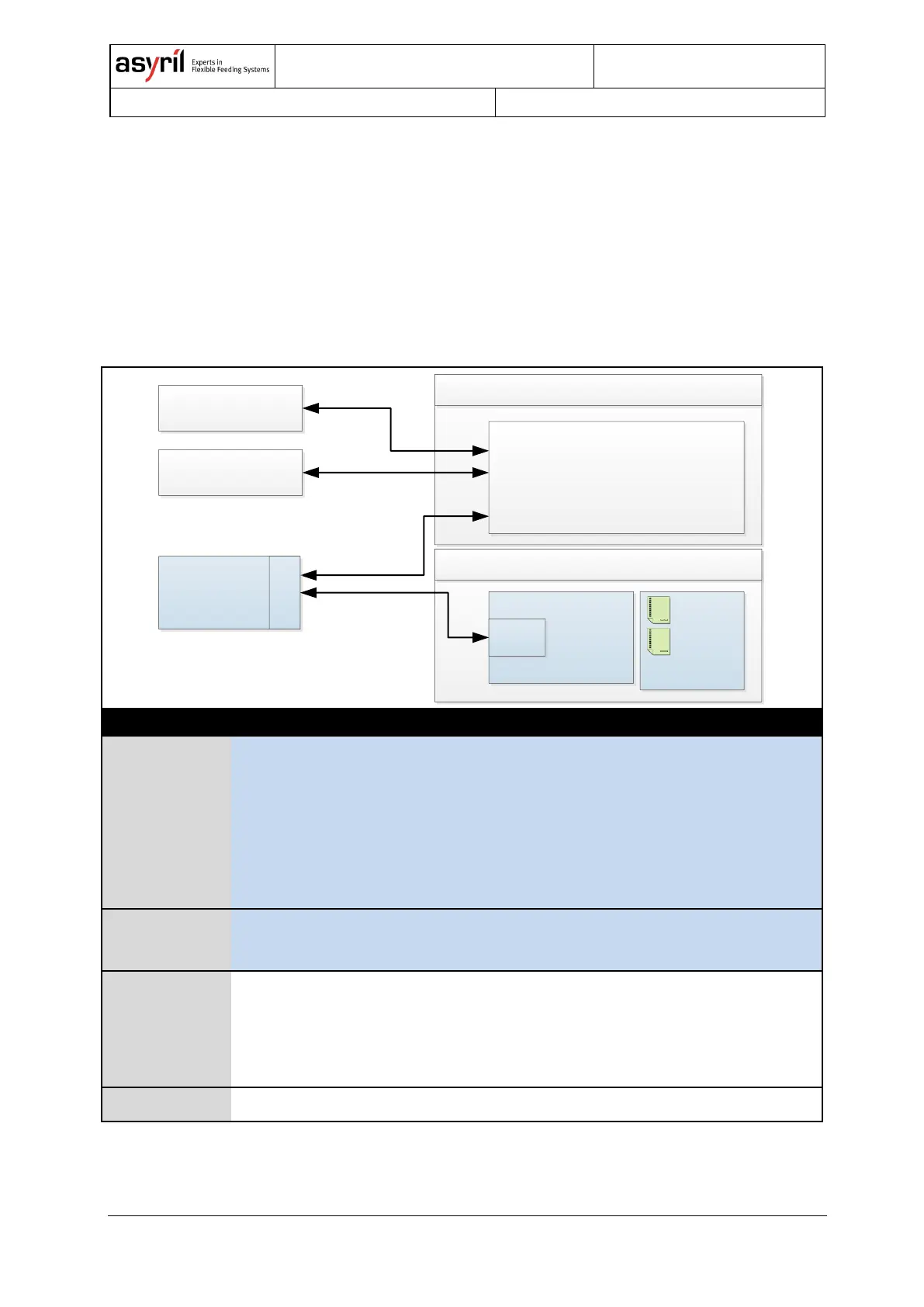
In this integration mode, the integrator uses the Asycube HMI to configure the Asycube from
an external PC (e.g. Laptop). The integrator communicates with the Asycube from his own
system (e.g. PLC) through Modbus TCP in order to execute the vibrations. Please refer to
Chapter 6 for more information on Modbus TCP. As an option, a gateway can be used to
convert the Asycube Modbus TCP data to industrial fieldbus data for the controller.
HMI PC (can be the same as controller)
PC
Controller
Asycube HMI
.fconf
.fseq
CAMERA
ROBOT
.dll
ASYCUBE
Firmware
MODBUS TCP
Generation and synchronization of the desired vibration
Execute sequences
Save and reload 25 vibration sets (26 for the reload)
Save and reload 25 sequences (26 for the reload)
Activation of the outputs and backlight
Choice/Management of the optimal sequence based on the vision feedback
Configuration and optimization of the feeding (vibration) parameters
Configuration and optimization of the sequences
Communication with the Asycube
Recipe management (memorize vibration set ID and sequence ID for each
component).
Synchronization of the feeder and the machine
Treatment of the recipe (read/write parameters)
Table 3-5: Integration mode: Asycube only
 Loading...
Loading...