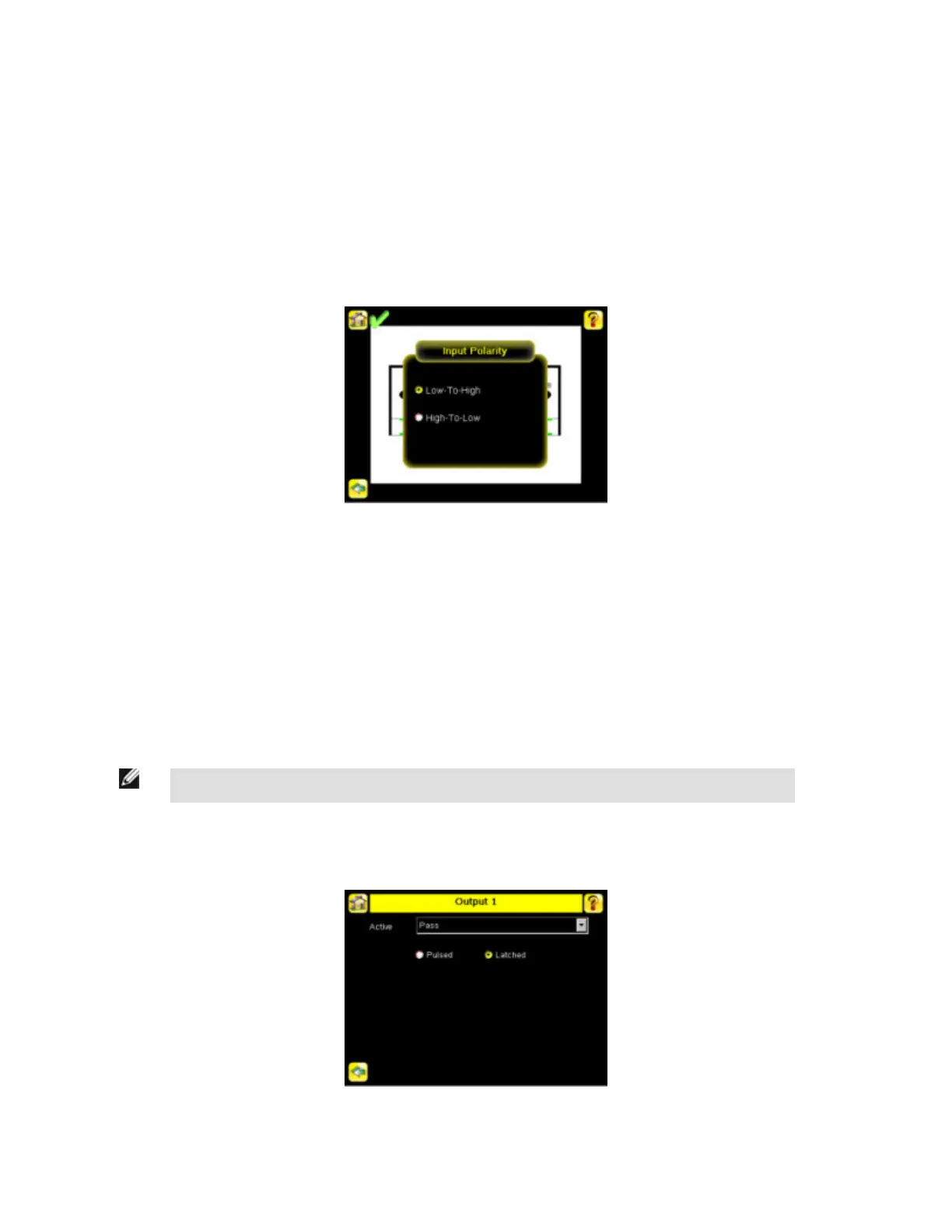
Input Polarity
The iVu has two input signals—Trigger and Remote Teach. The operation of these signals is dependent on the Input Polarity setting. Low
To High—The Trigger and Remote Teach are detected on a low to high transition of the signal. High To Low—The Trigger and Remote
Teach are detected on a high to low transition of the signal.
The default setting for a PNP sensor is Low To High, and for an NPN sensor it is High To Low. The user can change the setting on the
Input Polarity screen.
Main Menu > System > Sensor Configuration > Input Polarity
Output 1
Output 1 can be configured for Pass, Fail, Missed Trigger, or System Error.
• A Missed Trigger condition occurs when a trigger is received while the sensor is busy inspecting the previous image. This output
signal will be set to active state. This signal will be reset upon resetting the 'History' on the statistics page.
• A System Error condition occurs when a fatal error is detected on the sensor. This output signal will be set to active state. This signal
can be reset upon resetting the 'History' on the statistics page, or executing a 'ClearSystemError' command through command chan-
nel.
The default setting is Pass and Latched for Output 1. If Pulsed is selected, the default Pulse width is 50 ms.
NOTE: For Latched the signal is active until the results of an inspection cause a change in the signal output.
Main Menu > System > Sensor Configuration > Discrete I/O > Output 1
iVu Series Image Sensor
22 www.bannerengineering.com - tel: 763-544-3164 Rev. E

 Loading...
Loading...







