202 Epsilon EP-P Drive Reference Manual
www.controltechniques.com Revision: A4
the Watch Window closes.
Save Selections
By clicking on Save Selections, the user can save the specific parameters that have been added to the Watch Window. Once the selections
have been saved, the Restore Selections button can be used to monitor all the same parameters the next time the user opens the Watch
Window. Therefore, if there is a list of helpful diagnostic parameters the user wishes to see when online, those specific parameters can be
saved and recalled in the Watch Window at any time. The settings can be saved in the default file named “fm3watch.wch” or the user can
create their own file. Setup the parameter that will be displayed in the Watch Window, enter the file name in the Selection File text box, then
click the Save Selections button.
Restore Selections
By clicking on the Restore Selections button, the Watch Window will be filled with the list of parameters that were last saved using the Save
Selections button.
Select Defaults
The Select Defaults button adds the most commonly used parameters to the Watch Window.
Select I/O
The Select I/O button will add the drive digital inputs and outputs to the Watch Window.
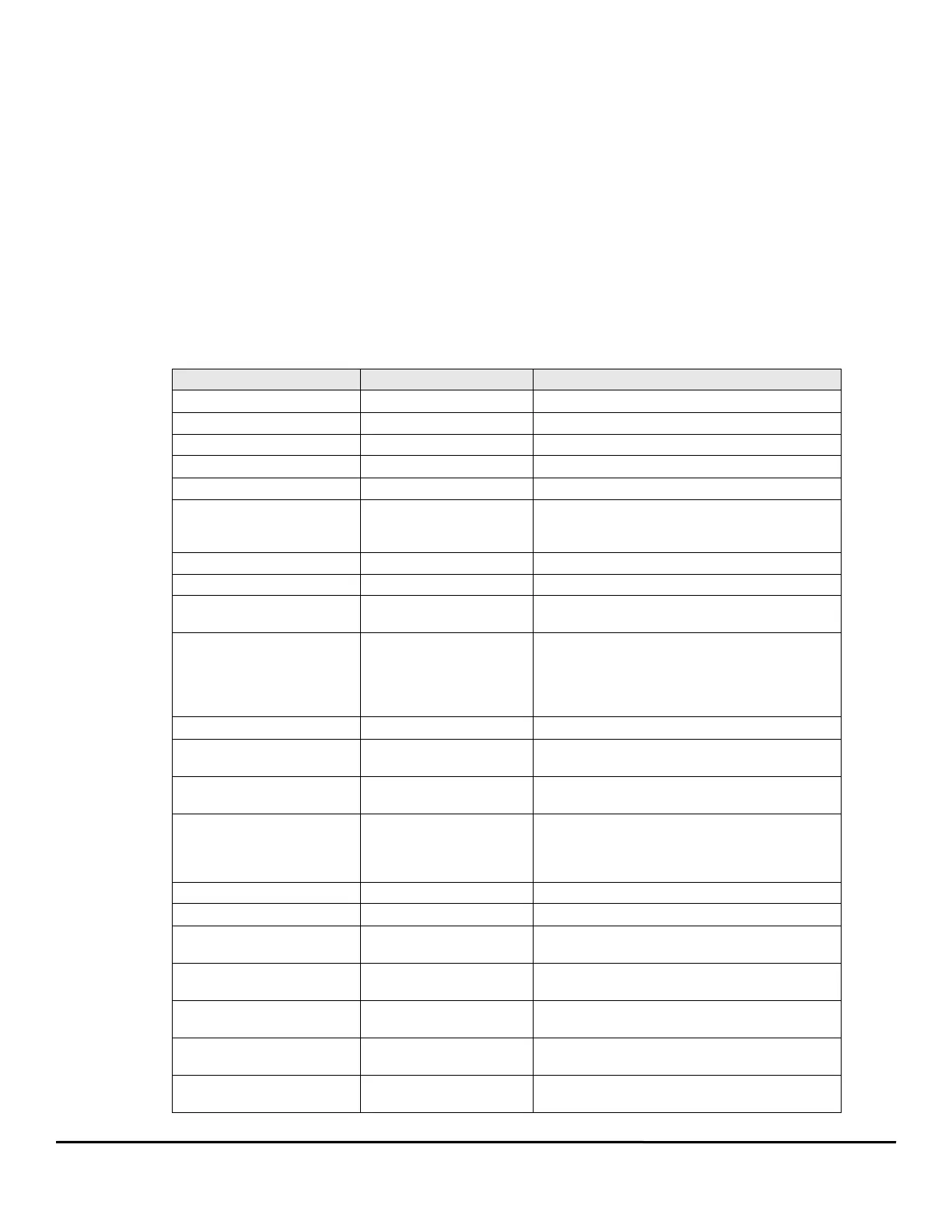
Not Moving?
The Not Moving? button will load the watch window with a list of predefined parameters (shown in the following table) that will give an
indication why the motor is not moving.
Parameters Expected Value to get Motion Comments
DriveEnableStatus True Drive must be enabled.
Fault.Faulted False Motion stops on a fault.
DriveOK True The drive status must be ok to enable motion.
PowerStageEnabled True Must have power to move the motor.
Stop False Motion is stopped if stop is active.
PowerSupplyReady True
PowerSupplyReady will become inactive if the 24 volt
logic power is taken away or if the bus voltage drops
below the "low bus fault" threshold.
MotionStop False Motion is stopped on motion stop.
SoftDriveDisable False Motion is prevented by SoftDriveDisable.
AbsolutePosnValid True
Absolute indexes can not executed until the Absolute
position is defined.
InPosn True
If using "In Position" the last index is not considered
complete until this status is met. So motion will stop if
you can not achieve in position. While running this is
expected to be false as it is only true at the end of a
move and prior to starting a new move.
Feedhold False Feed Hold stops motion.
FeedRateOverride 100%
Feed rate scales the speed of the Motion. 100%
scaling indicates one to one scaling.
FeedRateDeactivate False / True
Activate to disable FeedRate. If feedrate is 100% it
does not matter.
FoldbackActive False
When Foldback is active it indicates a current
overload and the Foldback circuit is limiting the
current. Foldback in it’s self indicates motor selection
of wiring problems that effect motor motion.
SoftwareTravelLimitMinusActive False Motion stops when a travel limit is active.
SoftwareTravelLimitPlusActive False Motion stops when a travel limit is active.
TorqueLimitActive False
Torque limits may effect motor motion as it reduces
motor generated torque.
Profile.0.MotionStop False
Each profile has it’s own Stop. To get motion out of
this profile this parameter must be false.
Profile.0.FeedHold False
Each profile has it’s own FeedHold. To get motion out
of this profile this parameter must be false.
Profile.1.MotionStop False
Each profile has it’s own Stop. To get motion out of
this profile this parameter must be false.
Profile.1.FeedHold False
Each profile has it’s own FeedHold. To get motion out
of this profile this parameter must be false.