Menu 2
Parameter
structure
Keypad and
display
Parameter x.00
Parameter description
format
Advanced parameter
descriptions
Serial comms
protocol
Performance
40 Mentor MP Advanced User Guide
www.controltechniques.com Issue Number: 4
The motor and load inertia (Pr 3.18), motor torque per amp (Pr 5.32) and the rate of change of the ramp output (Pr 2.01 {di03, 0.38}) are used to
produce a torque feed forward value that will accelerate or decelerate the load at the required rate. This value can be used as a feed forward term that
is added to the speed controller output if Pr 4.22 is set to one. Pr 2.38 shows the torque value as a percentage of rated active current.
When this parameter is 0 the ramp rates will be the time to reach the maximum speed (Pr 1.06 {SE02, 0.23}), for example if Pr 2.39 = 0 and Pr 1.06
{SE02, 0.23} = 1500 rpm and Pr 2.11 {SE03, 0.24} = 10 s then the drive will take 10 s to accelerate from 0 rpm to 1500 rpm.
When this parameter is not 0 the ramp times will be the time from 0 rpm to the value in Pr 2.39, for example setting Pr 2.39 = 1000 rpm and Pr 2.11
{SE03, 0.24} = 5 s the drive will take 5 s to accelerate from 0 rpm to 1000 rpm.
When the S ramp is enabled this parameter defines the time in each curved part of the S ramp. The total ramp time will be normal ramp rate time plus
this parameter when Pr 2.40 is less than or equal the linear ramp time set by Pr 2.11 {SE03, 0.24}. When Pr 2.40 is greater than the linear ramp time
the total ramp time will be
J = (Pr 2.11 {SE03, 0.24} x Pr 2.40 x 1000) / Pr 1.06 {SE02, 0.23}
J can then be used in equation in parameter description for Pr 2.07.
Only Pr 2.11 {SE03, 0.24} is used in conjunction with this parameter to set the time.
When this parameter is 1 (default) and the S ramp is enabled then Pr 2.40 is used to define the S ramp time. When this parameter is 0 and the S ramp
is enabled then Pr 2.07 is used to define the S ramp limit.
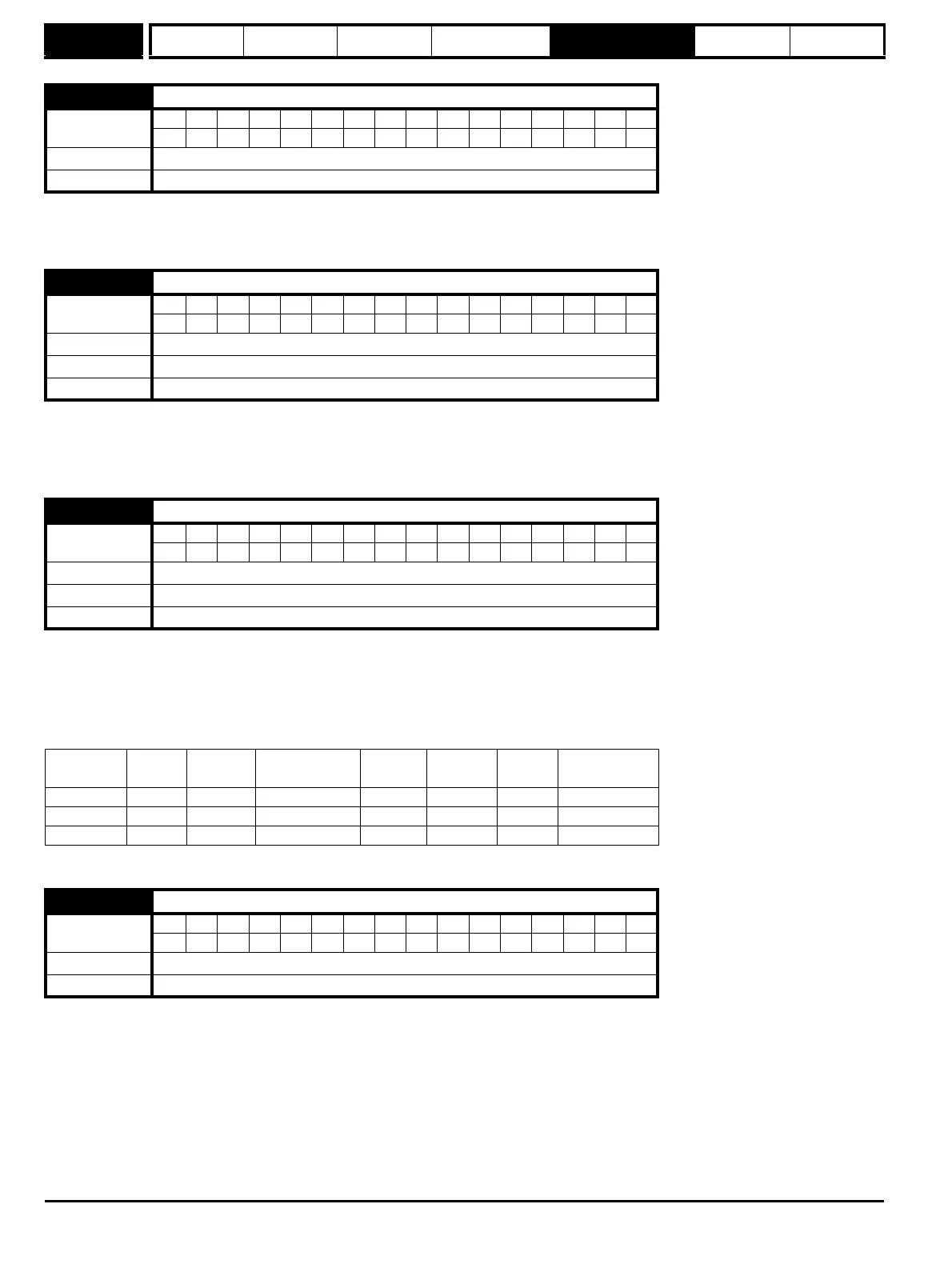
2.38 Inertia compensation torque
Coding
Bit SP FI DE Txt VM DP ND RA NC NV PT US RW BU PS
1111
Range ±1,000.0 %
Update rate 4 ms write
2.39 Ramp rate speed units
Coding
Bit SP FI DE Txt VM DP ND RA NC NV PT US RW BU PS
111
Range 0 to 10,000 rpm
Default 0
Update rate Background read
2.40 Time of S ramp
Coding
Bit SP FI DE Txt VM DP ND RA NC NV PT US RW BU PS
3111
Range 0.000 to 100.000 s
Default 1.250
Update rate Background read
Pr 1.06
{SE02, 0.23}
Pr 2.06 Pr 2.07
Pr 2.11
{SE03, 0.24}
Pr 2.39 Pr 2.40 Pr 2.41
Total ramp
time (s)
1750.0 Off 3.6 5.000 0 1.250 On 5.00
1750.0 On 3,6 5.000 0 1.250 On 6.25
1750.0 On 3.6 5.000 0 10.000 On 14.14
2.41 S ramp mode
Coding
Bit SP FI DE Txt VM DP ND RA NC NV PT US RW BU PS
1111
Default 1
Update rate Background read