Parameter
structure
Keypad and
display
Parameter x.00
Parameter description
format
Advanced parameter
descriptions
Serial comms
protocol
Performance
Menu 4
Mentor MP Advanced User Guide 63
Issue Number: 4 www.controltechniques.com
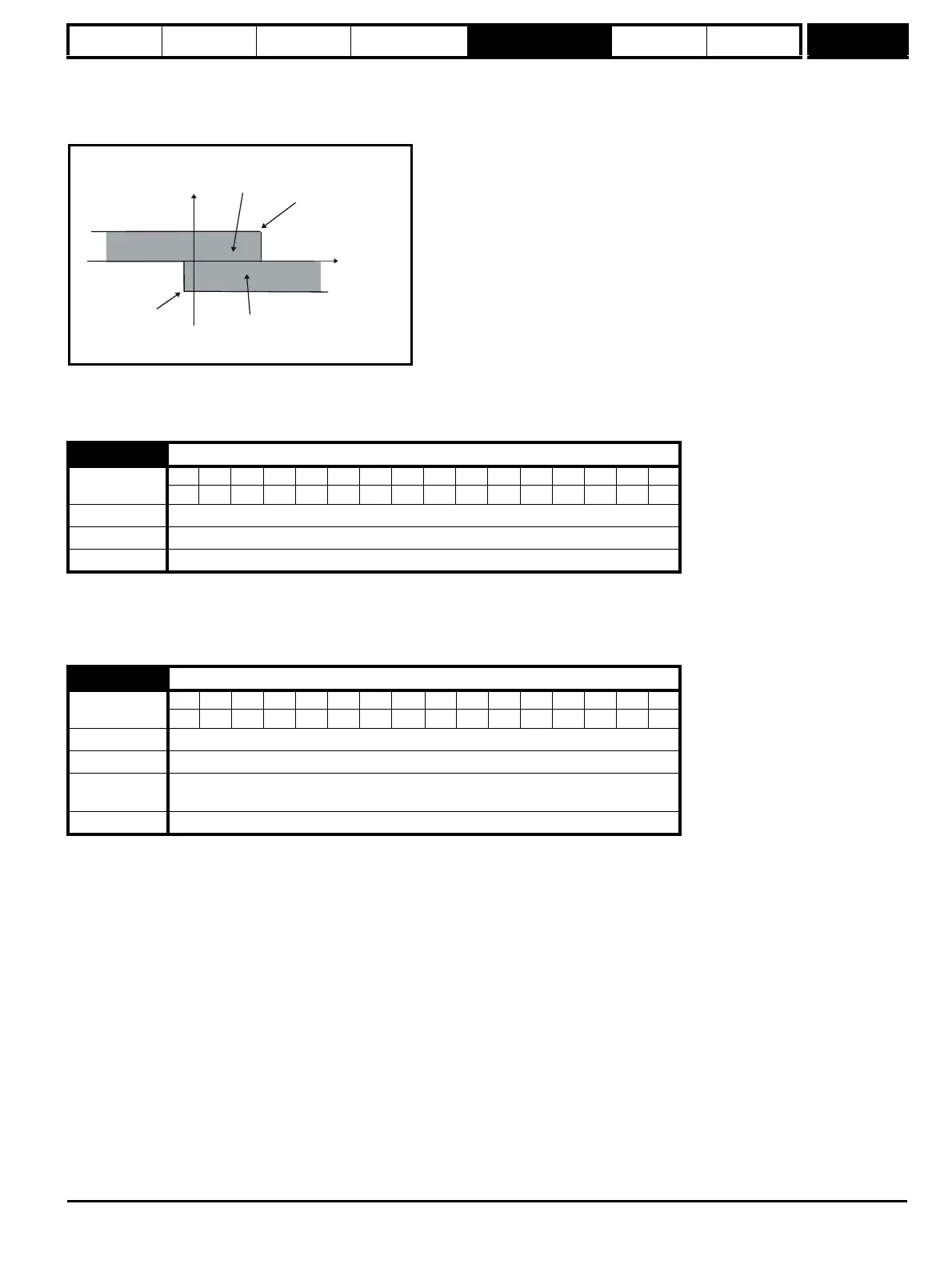
Example of uncoiler operation:
This is an example for an uncoiler operating in the positive direction. The final speed demand should be set to a level just above the maximum normal
speed. When the resultant torque demand is negative the uncoiler will apply tension and try and rotate at 5 rpm in reverse, and so take up any slack.
The uncoiler can operate at any positive speed applying tension. If it is necessary to accelerate the uncoiler a positive resultant torque demand is
used. The speed will be limited to the final speed demand. The operating area is the same as that for the coiler and is shown below:
4: Speed control with torque feed-forward
The drive operates under speed control, but a torque value may be added to the output of the speed controller. This can be used to improve the
regulation of systems where the speed loop gains need to be low for stability.
A first order filter, with a filter defined by this parameter, is provided on the current demand to reduce acoustic noise and vibration produced as a result
of position feedback quantization noise. The filter introduces a lag in the speed loop, and so the speed loop gains may need to be reduced to maintain
stability as the filter is increased. Alternative filters can be selected depending on the value of the speed controller gain selector (Pr 3.16). If Pr 3.16 =
0 Pr 4.12 is used, if Pr 3.16 = 1 Pr 4.23 is used.
The proportional gain Kp (Pr 4.13) is the most critical value in controlling the performance of the current controllers. This value can be set using the
auto-tuning feature (see Pr 5.12 {SE13, 0.34}).
It is possible to increase the proportional gain (Kp) to reduce the response time of the current controllers. If Kp is increased by a factor of 1.5 then the
response to a step change of reference will give 12.5 % overshoot. It is recommended that Ki be increased in preference to Kp.
The gain values that are calculated by the autotune system should give the best response with minimal overshoot. If required the gains can be
adjusted to improve performance.
Pr 4.13 = 3393 x L x f x Imax / V rms
Where :
L is the load inductance in Henries
R is the load resistance in ohms
f is the supply frequency in Hertz
Imax is the peak load current (including any overload) in amps
V rms is the line-to-line supply voltage in volts.
4.12 Current demand filter 1
Coding
Bit SP FI DE Txt VM DP ND RA NC NV PT US RW BU PS
1 111
Range 0.0 to 25.0 ms
Default 6.0
Update rate Background read
4.13 Continuous current controller Kp gain
Coding
Bit SP FI DE Txt VM DP ND RA NC NV PT US RW BU PS
1111
Range 0 to 4000
Default 100
Second motor
parameter
Pr 21.13
Update rate Background read
-5rpm
Area for normal uncoiler
operation: negative torque,
limited to low speed in reverse
Speed reference
Area for accelerating
uncoiler: positive torque,
limited speed
Speed
Tor qu e