12.3 Double-sided Two-way Ranging
12.3.1 Using 4 messages
Double-sided two-way ranging (DS-TWR), is an extension of the basic single-sided two-way ranging in which
two round trip time measurements are used and combined to give a time-of-flight result which has a
reduced error even for quite long response delays.
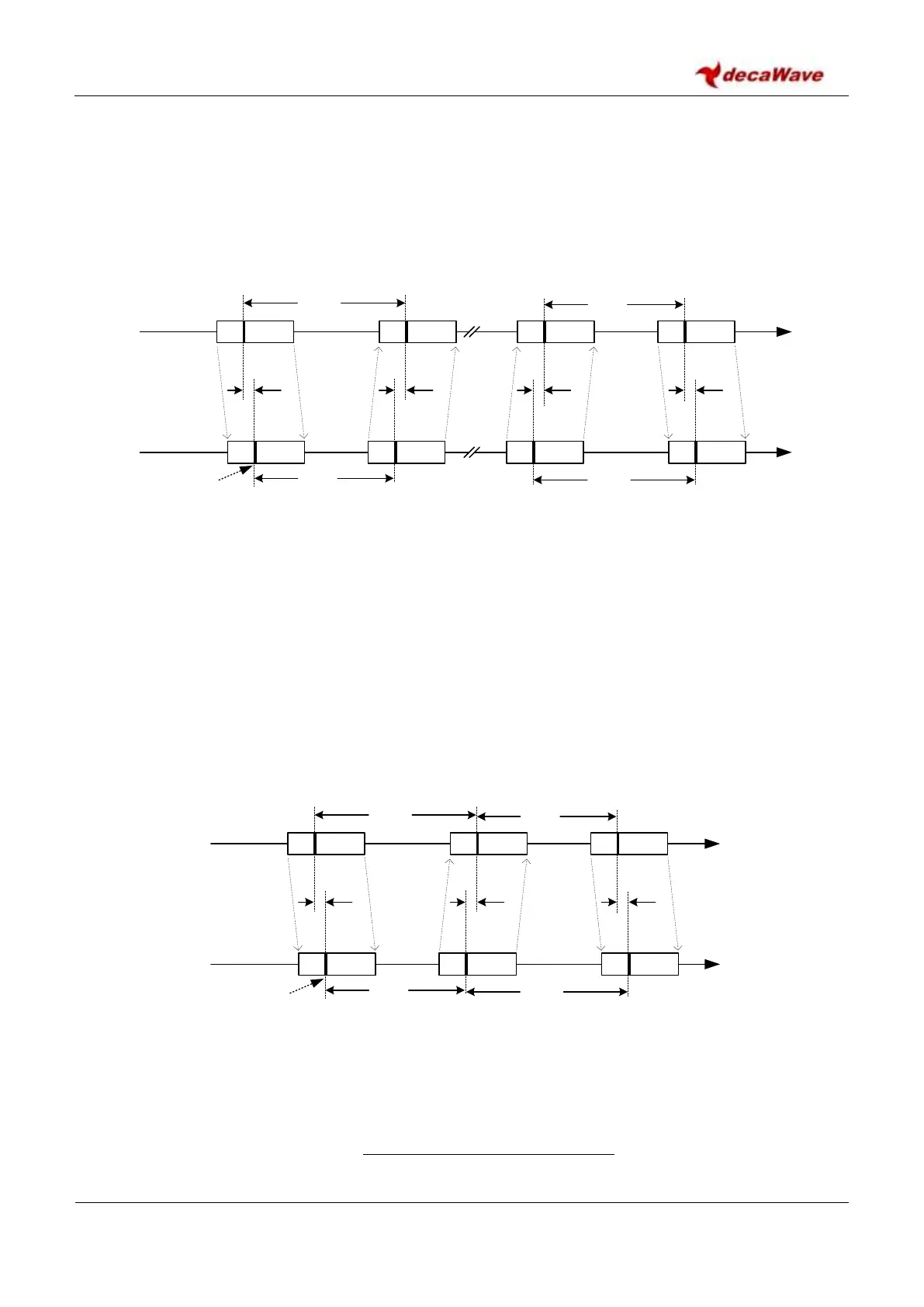
Figure 37: Double-sided two-way ranging with four messages
The operation of DS-TWR is as shown in Figure 37, where device A initiates the first round trip measurement
to which device B responds, after which device B initiates the second round trip measurement to which
device A responds completing the full DS-TWR exchange. Each device precisely timestamps the transmission
and reception times of the messages.
12.3.2 Using three messages
The four messages of DS-TWR, shown in Figure 37, can be reduced to three messages by using the reply of
the first round-trip measurement as the initiator of the second round-trip measurement. This is shown in
Figure 38.
Figure 38: Double-sided Two-way ranging with three messages
The resultant time-of-flight estimate, T
prop
, in both the three and four message cases may be calculated using
the expression:
Device A
Device B
TX
T
prop
T
prop
RX
RX TX
T
reply1
T
round1
RMARKER
time
TX RX
RX TX
T
reply2
T
round2
T
prop
T
prop
Device A
Device B
TX
T
prop
T
prop
RX
RX TX
T
reply1
T
round1
time
RX
TX
T
reply2
T
round2
T
prop
RMARKER