Chapter 8 Logic Instructions
Parameter name Function Data type Valid range
Active TRUE when the instruction is being executed. BOOL TRUE / FALSE
Error TRUE while there is an error. BOOL TRUE / FALSE
ErrorID
Contains the error code when an error occurs. Please
refer to section 12.2 for the corresponding error ID.
WORD -
Output Update Timing
Parameter Name Timing for changing to TRUE Timing for changing to FALSE
Done
When the reading of the
parameter values is finished.
When Execute changes from
TRUE to FALSE after the
instruction execution is completed.
Busy
When Execute changes to TRUE
When Done changes from FALSE
to TRUE
When Error changes to TRUE.
Active
When the instruction execution
begins
When Error changes to TRUE.
When Done changes from FALSE
Error
When an error occurs in the
instruction execution or the input
parameters for the instruction are
illegal.
When Execute changes from
TRUE to FALSE
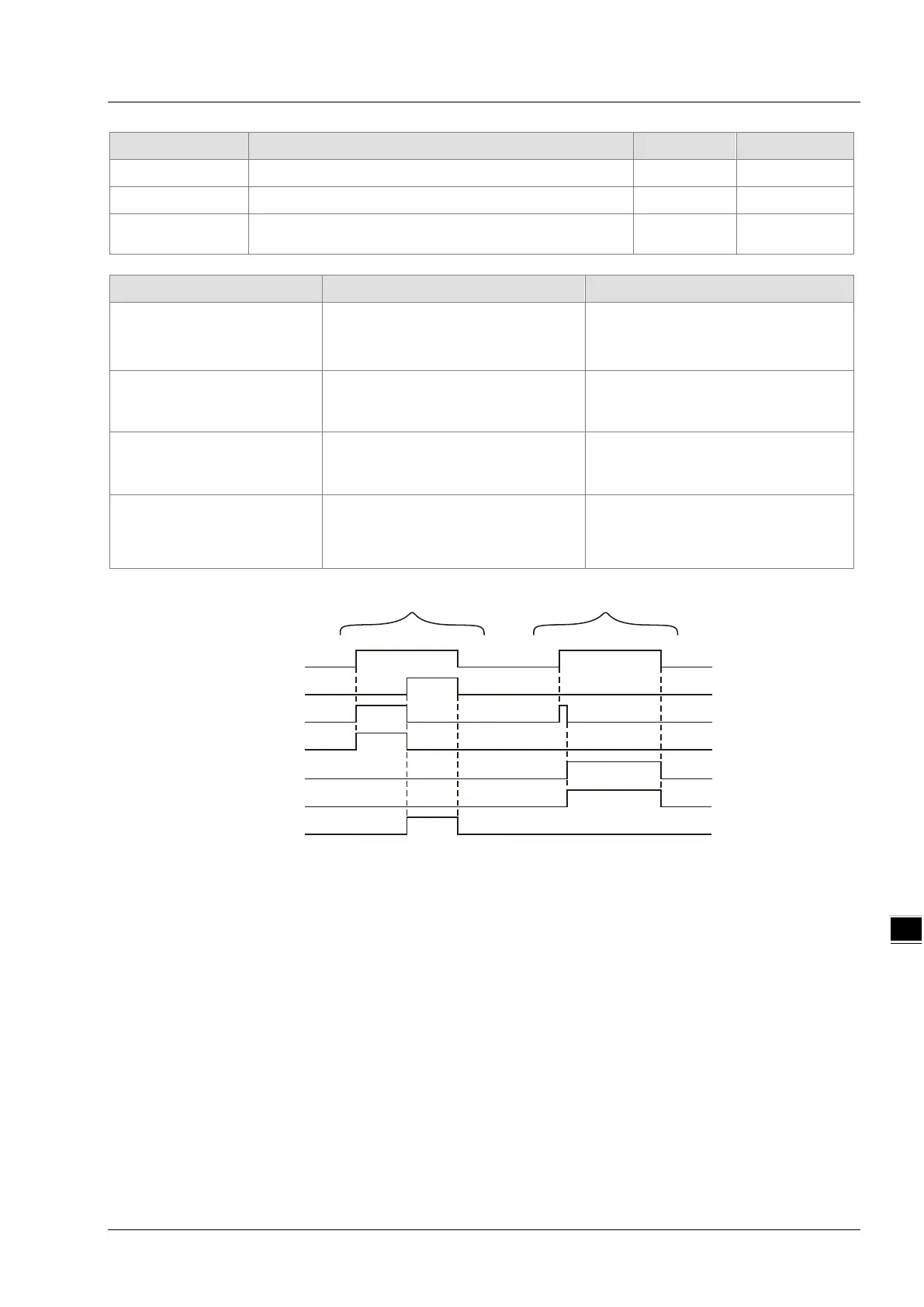
Output Update Timing Chart
Execute
Done
Busy
Active
Error
ErrorID
Case 1
DesPtr
Case 2
Case 1: When Execute changes from FALSE to TRUE, Busy and Active change to TRUE and one
period later, Done changes to TRUE. Meanwhile Busy and Active change to FALSE and DesPtr
shows the corrsponding data in CR registers of the extension module. When Execute changes
from TRUE to FALSE, Done changes from TRUE to FALSE and the value of DesPtr is cleared
to 0.
Case 2: When an error occurs as Execute is TRUE, Error changes from FALSE to TRUE and ErrorID
shows corresponding error codes. Error changes from TRUE to FALSE and the value in ErrorID
is cleared to 0 after Execute changes from TRUE to FALSE.
Function Explanation
The FROM instruction can be applied to read the values in the registers of the left-side and righ-side
extension modules.
The position of the left-side and right-side module is specified by StationID. The Station ID range of right-side
module is 0~7. 0 represents the first extension analog module at the right side and 7 means the eight
extension analog module at the right side. The Station ID range of left-side modules is 100~107. 100
represents the first extension module at the left side and 107 means the eight extension module at the left
8-203