Chapter 12 Troubleshooting
1
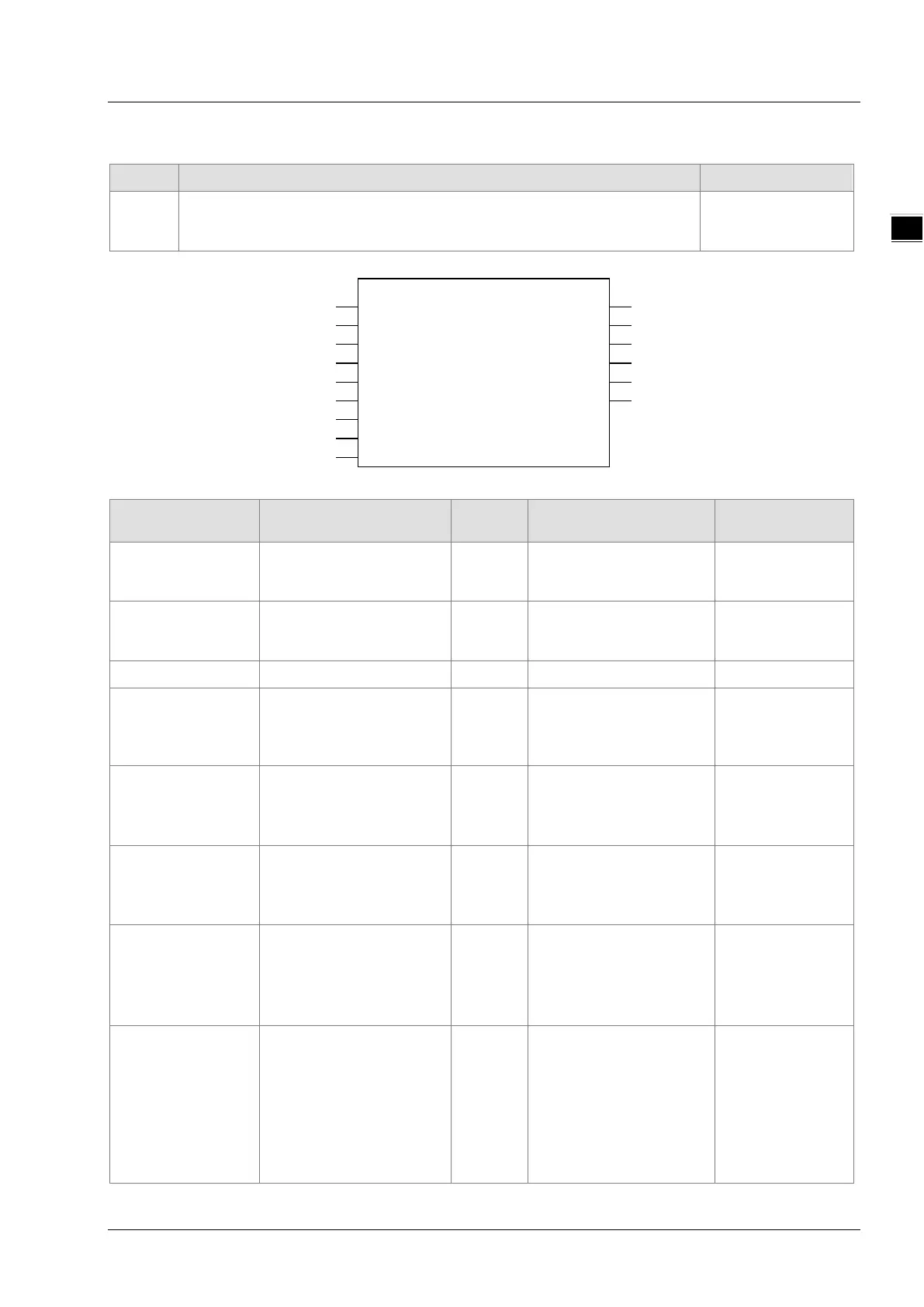
11.3.3 MC_MoveVelocity
FB/FC Explanation Applicable model
FB
MC_MoveVelocity controls the axis motion based on the set acceleration
and deceleration till the set target velocity is reached and then the axis
DVP15MC11T
Input Parameters
Parameter name Function Data type
Validation timing
Axis
Specify the number of the
axis which is to be
USINT
(The variable value must
changes from
Execute
The instruction is executed
when Execute changes
BOOL
TRUE or FALSE
(FALSE)
-
ContinuousUpdate Reserved - - -
Velocity
Specify the target speed
(Unit: unit/second)
LREAL
(
be set)
When Execute
changes from
FALSE to TRUE
Acceleration
acceleration (Unit:
unit/second
2
)
LREAL
(
be set)
When Execute
changes from
FALSE to TRUE
Deceleration
deceleration (Unit:
unit/second
2
)
LREAL
Positive number
(
be set)
When Execute
changes from
FALSE to TRUE
Jerk
Specify the change rate of
target acceleration or
deceleration.
(Unit: Unit/s
3
)
LREAL
Positive number
(
be set)
When Execute
changes from
FALSE to TRUE
Direction
direction
1: Positive direction
3: Negative direction
4: Current direction (When
the motor is in stop state,
the current direction is the
positive direction.)
MC_Direc
tion
1: mcPositiveDirection,
3: mcNegativeDirection
4: mcCurrentDirection,
(1)
When Execute
changes from
FALSE to TRUE
MC_MoveVelocity
Axis Invelocity
MC_MoveVelocity_instance
Execute
ContinuousUpdate
Busy
Active
Velocity
Error
ErrorID
CommandAborted
Acceleration
Deceleration
Jerk
Direction
BufferMode
11-19