DVP15MC11T Operation Manual
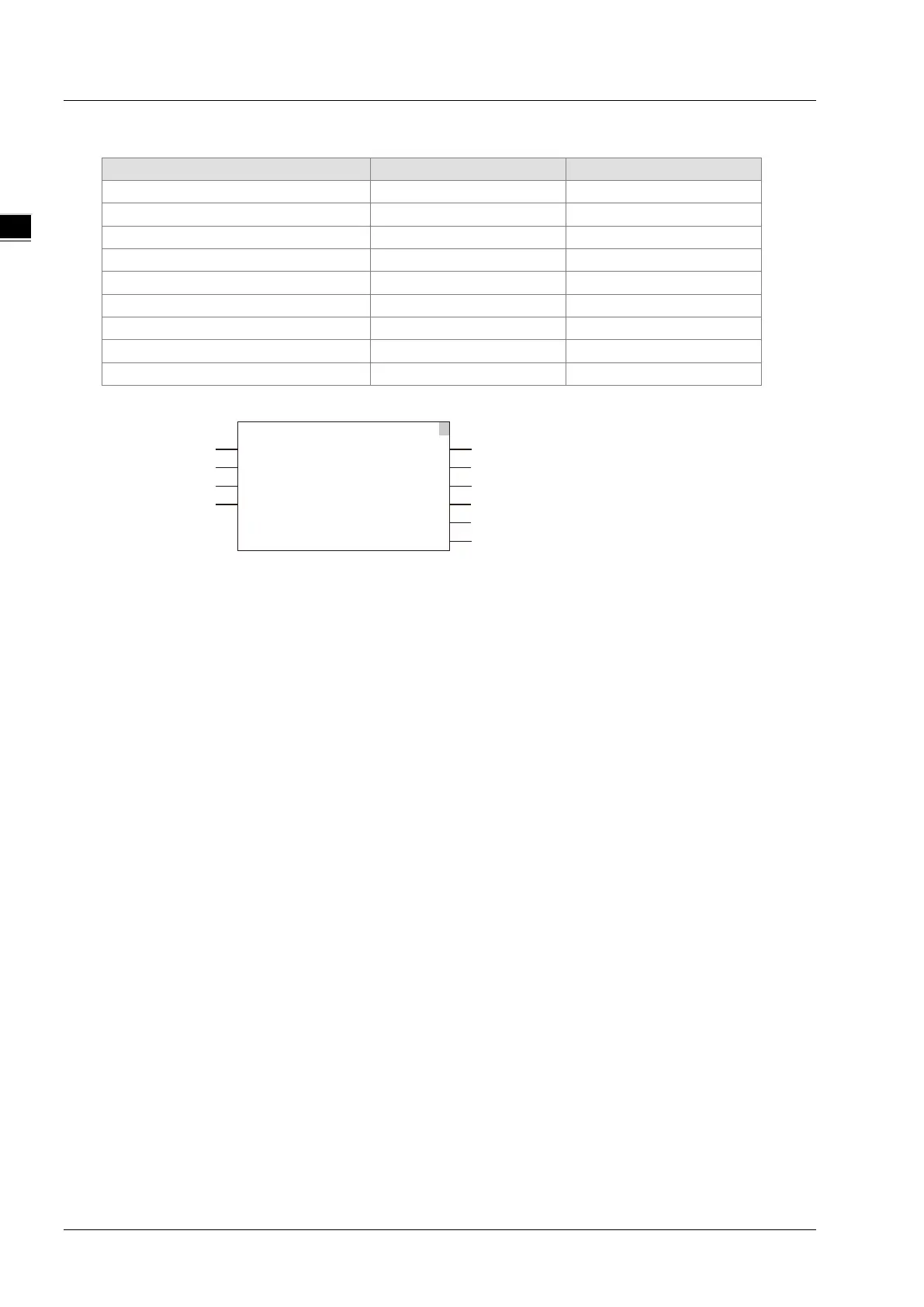
The variable table and program
When Hom_Ex changes from FALSE to TRUE, the motion controller controls the motion of the
servo motor. The mechanism starts to run reversely, rotates forward after reaching the home
switch and then stops at the mechanical zero point. And the mechanism is driven to return to
the mechanical zero point A by doing so.
When the home switch is met, the homing is completed and Hom_Done is set to ON.
1
Axis1
Hom_Ex
0.0
Hom_Bsy
Hom_Act
Hom_Abt
Hom_Err
Hom_ErrID
Hom_Done
MC_Home
Axis Done
Hom
Execute
Position
Busy
Active
BufferMode
Error
ErrorID
CommandAborted
11-18