DVP15MC11T Operation Manual
Serial No Parameter Name Function Data Type
Default
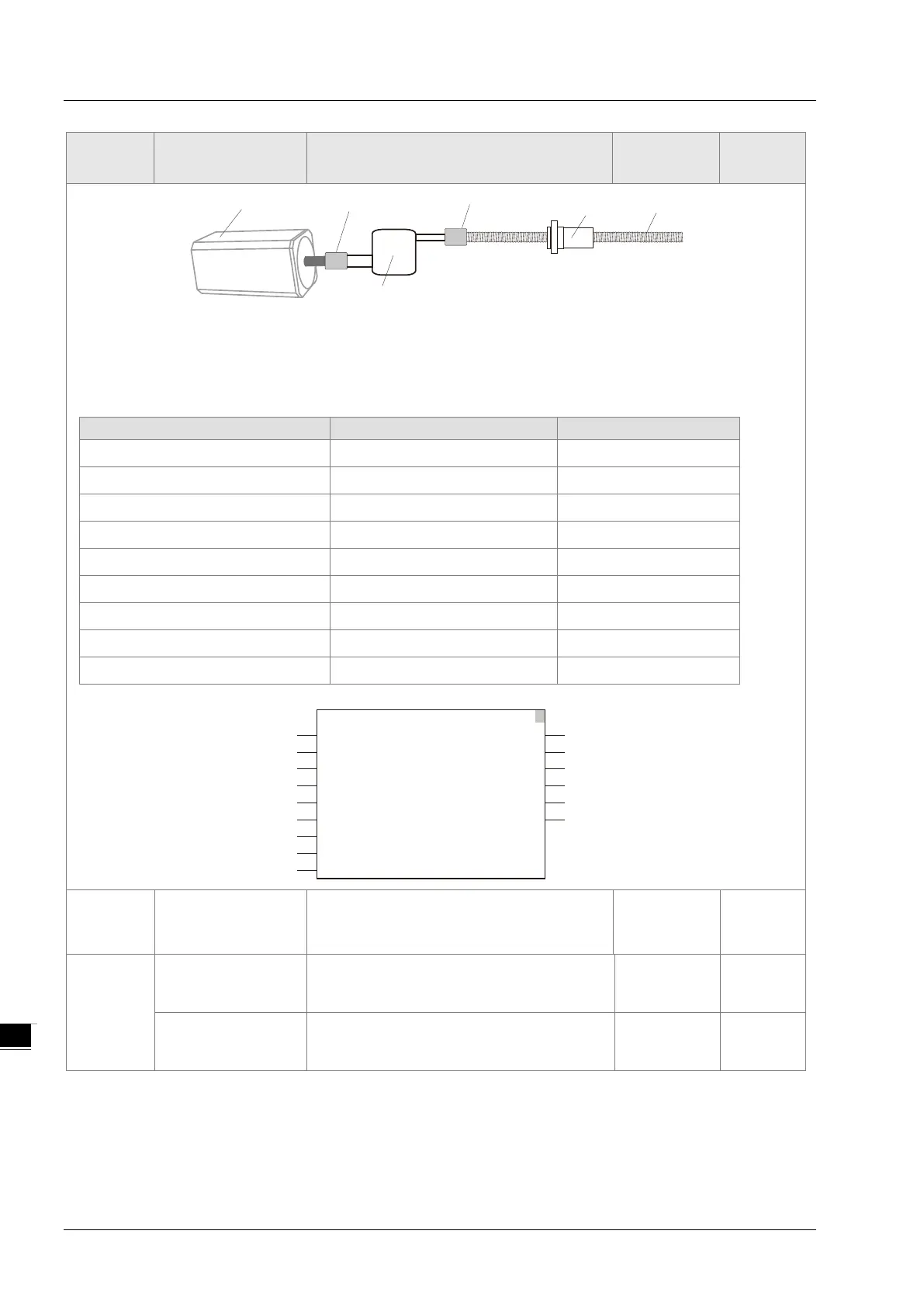
As mentioned above, UnitsPerRotation is set to 1 and the ball screw will move 50 mm at the velocity
1mm/s, acceleration 2mm/ s
2
and change rate of acceleration 1mm/s
3
after the following
MC_MoveRelative is executed.
The variable table and program
Rel MC_MoveRelative
Rel_Ex BOOL FALSE
Rel_BM MC_Buffer_Mode 0
Rel_Done BOOL
Rel_Bsy BOOL
Rel_Act BOOL
Rel_Abt BOOL
Rel_Err BOOL
Rel_ErrID WORD
15 Homing Mode
Set the homing mode of the servo drive;
range: 1~ 35.
See appendix D for more details.
UINT 1
16
Speed 1
The speed from starting homing to finding
the home switch; Unit: rpm, setting range:
1-2000 rpm
UDINT 20
Speed 2
The speed from finding the home switch to
reaching the mechanical home; Unit: rpm,
UDINT 10
Servo mot or
Coupling
Screw part
Gear box
Screw
shaft
Coupling
1:2Input
Output
1
Rel_Bsy
Rel_Act
Rel_Abt
Rel_Err
Rel_ErrID
Rel_Done
Rel_Ex
Axis1
50.0
1.0
2.0
2.0
1
Rel_BM
MC_MoveRelative
Axis Done
Rel
Execute
ContinuousUpdate
Busy
Active
Distance CommandAborted
Error
ErrorIDAcceleration
Deceleration
Jerk
BufferMode
Velocity
9-4