DVP15MC11T Operation Manual
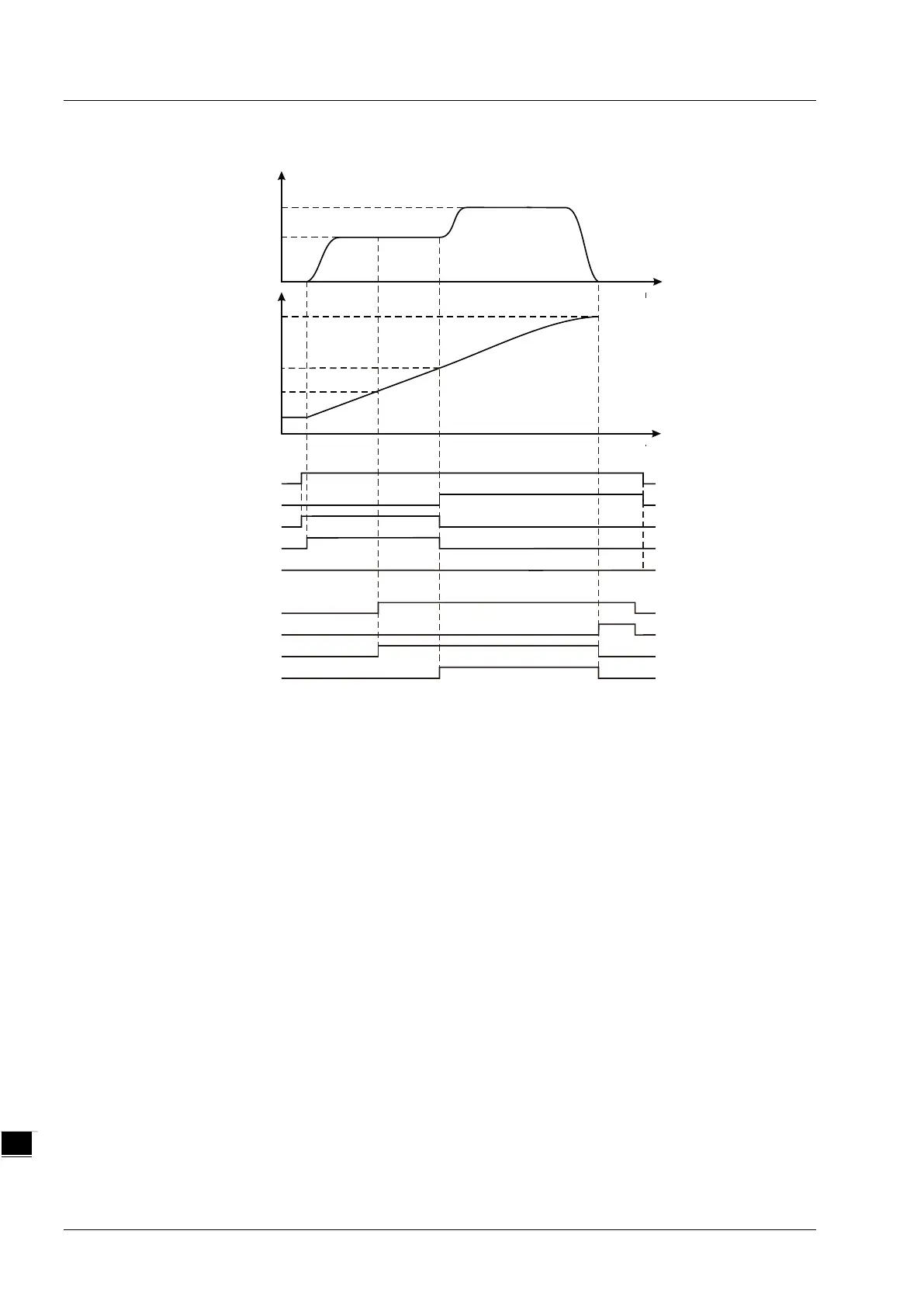
Rel2_BM =mcBlendingLow
As Rel1_Ex changes from FALSE to TRUE, Rel1_Bsy changes to TRUE. One period later,
Rel1_Act changes to TRUE and the first MC_MoveRelative instruction execution starts. While
the target position is not reached yet and Rel2_Ex changes from FALSE to TRUE, Rel2_Bsy
changes to TRUE, Rel1_Bsy and Rel1_Act remain TRUE and the first MC_MoveRelative
instruction execution continues. As the target position is reached, Rel1_Done changes to
TRUE. At the moment, the velocity is 300 units /second which is the lower one of the target
velocities of the current instruction and buffered instruction, Rel1_Bsy and Rel1_Act change to
FALSE, Rel2_Act changes to TRUE and the second MC_MoveRelative instruction execution
starts immediately. As the target position is reached, Rel2_Done changes to TRUE and
meanwhile Rel2_Bsy and Rel2_Act change to FALSE.
As Rel1_Ex changes from TRUE to FALSE, Rel1_Done changes to FALSE. As Rel2_Ex
changes from TRUE to FALSE, Rel2_Done changes to FALSE.
300
16000
4500
2000
500
Rel1_Ex
Rel1_Done
Rel1_Bsy
Rel1_Act
Rel1_Abt
Velocity
Position
Time
Time
Rel1
Rel2_Ex
Rel2_Bsy
Rel2_Act
Rel2_Done
Rel2
7000
10-16