Chapter 10 Motion Control Function
1
Vel _BM =mcBlendingHigh
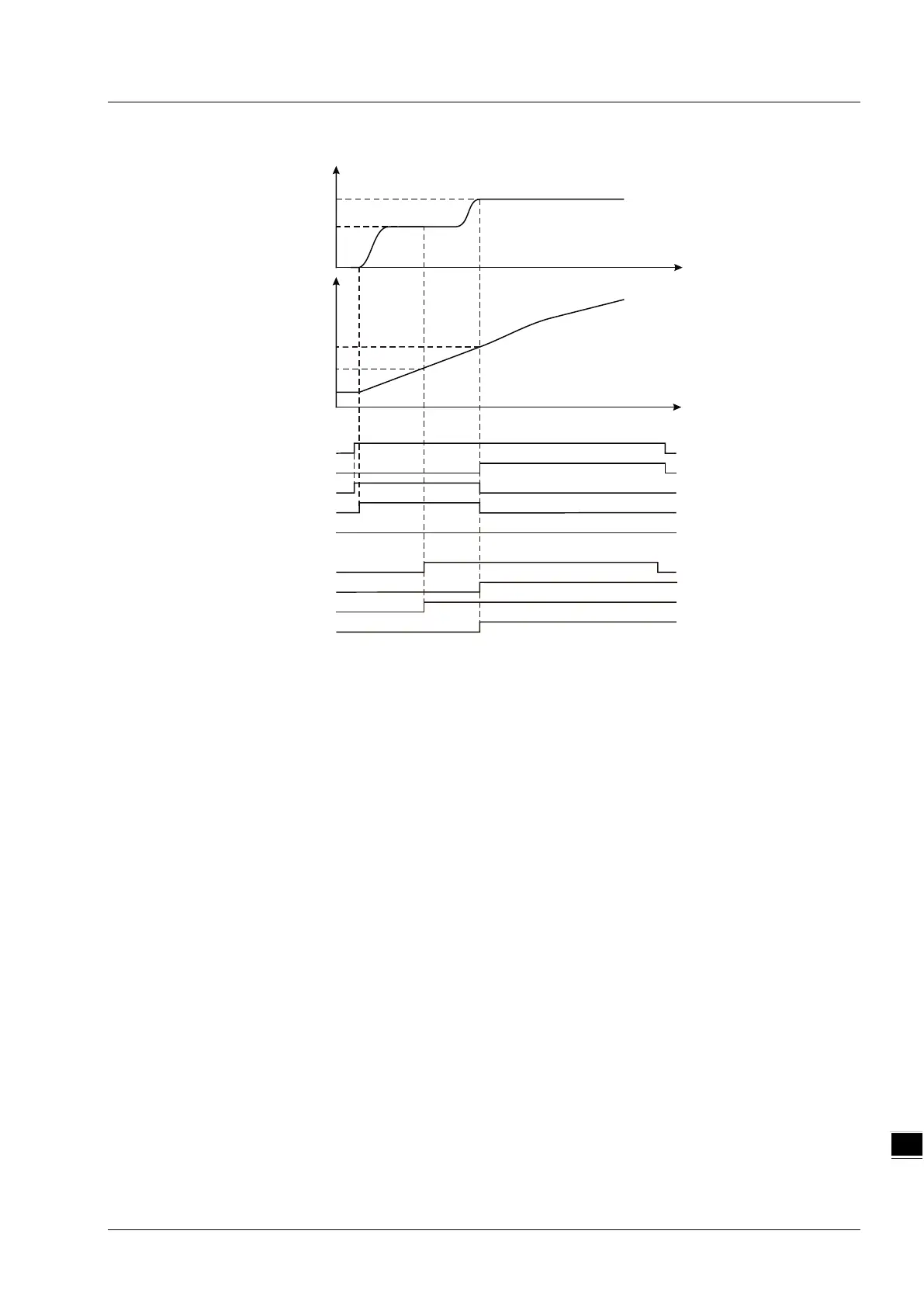
As Rel_Ex changes from FALSE to TRUE, Rel_Bsy changes to TRUE. One period later,
Rel_Act changes to TRUE. When the target position is not reached, Vel_Ex changes from
FALSE to TRUE and Vel_Bsy changes to TRUE. The axis will wait for the completion of
MC_MoveRelative execution. After MC_MoveRelative execution is completed, Rel_Done
changes to TRUE, Rel_Bsy changes to FALSE and Rel_Act changes to FALSE. At the moment,
the velocity is 20000units/second (which is the higher one of the target speeds of the current
instruction and the buffered instruction). And then the axis runs according to the velocity,
acceleration and deceleration specified by the velocity instruction. Vel_Invel changes to TRUE
when the target velocity is reached.
Rel_Vel
S
2
S
1
Vel_Vel
Rel_Ex
Rel_Done
Rel_Bsy
Rel_Act
Rel_Abt
Velocity
Position
Time
Time
Rel
Ve l_Ex
Vel_Bsy
Vel_Act
Vel_Invel
Vel
Rel_Dist
10-31