Chapter 12 Troubleshooting
1
Parameter Name
Timing for changing to
TRUE
Timing for changing to FALSE
Busy
When Execute changes
TRUE.
When Error changes to TRUE.
When CommandAborted changes to TRUE.
Active
When the instruction
starts to control the axis.
When Error changes to TRUE.
When CommandAborted changes to TRUE.
CommandAborted
When this instruction
execution is aborted by
other motion control
instruction.
When Execute changes from TRUE to FALSE.
CommandAborted is set to TRUE when the
instruction is aborted by other instruction after
Execute changes from TRUE to FALSE during the
instruction execution. One cycle later,
CommandAborted changes to FALSE.
Error
the instruction execution
or the input parameters for
the instruction are illegal.
When Execute changes from TRUE to FALSE.
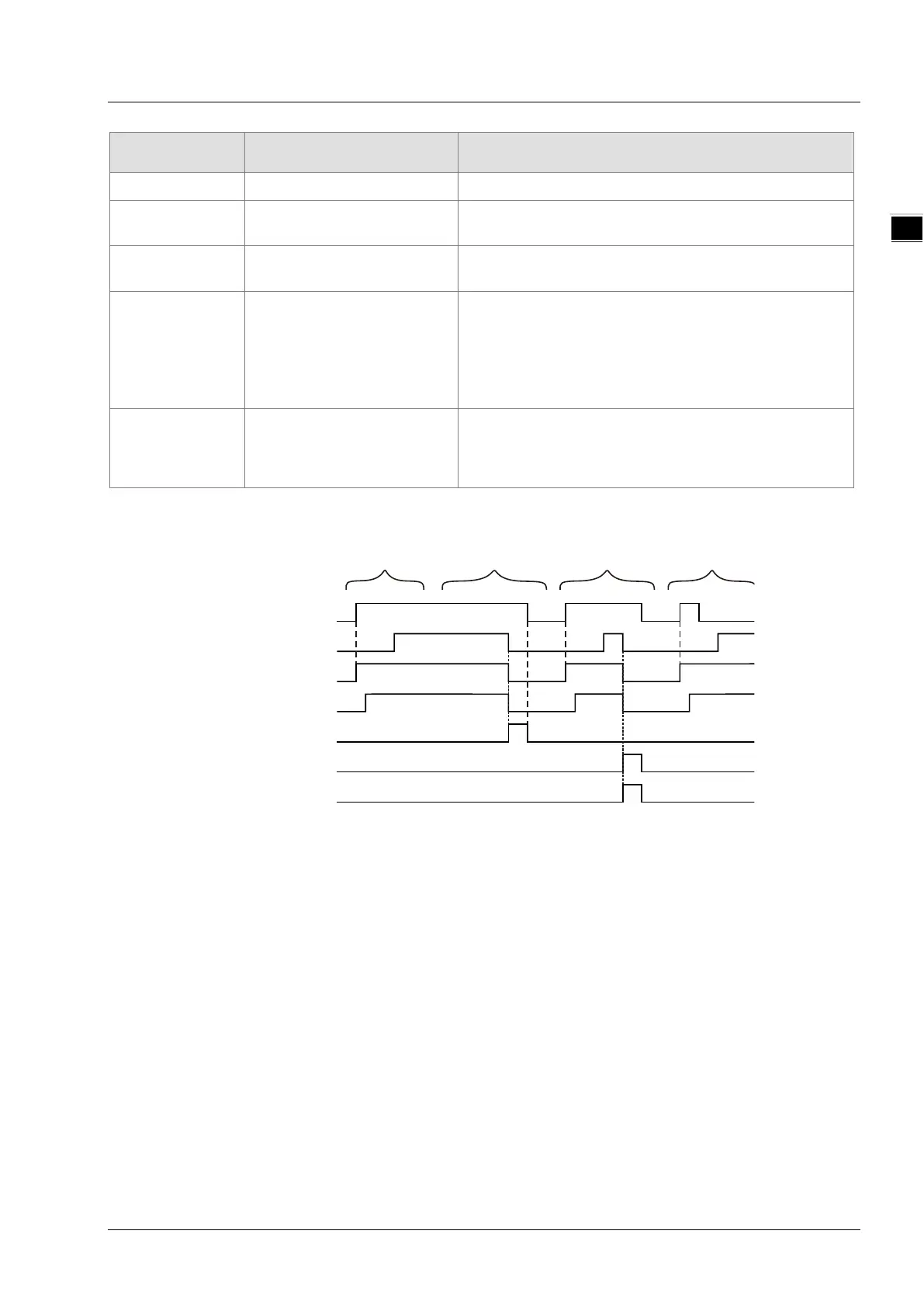
Output Update Timing Chart
Case 1: When Execute changes from FALSE to TRUE, Busy changes to TRUE and one cycle later,
Active changes to TRUE. When the target velocity is reached, Invelocity changes to TRUE and
meanwhile, Busy and Active remain TRUE.
Case 2: When Execute is TRUE, the instruction is aborted by other instruction and CommandAborted
changes to TRUE. Meanwhile, Invelocity, Busy and Active change to FALSE. When Execute
changes from TRUE to FALSE, CommandAborted changes to FALSE.
Case 3: When an error occurs such as parameter error while Execute is TRUE, Error changes to TRUE
and ErrorID shows corresponding error code. Meanwhile, Invelocity, Busy and Active change
to FALSE. Error changes to FALSE when Execute changes from TRUE to FALSE.
Case 4: In the course of execution of the instruction, Invelocity changes to TRUE when the target
velocity is reached after Execute changes from TRUE to FALSE. Meanwhile, Busy and Active
remain TRUE.
Function
MC_MoveVelocity controls the axis to speed up or down according to the set acceleration, deceleration and
jerk till the set target velocity is reached and after that the axis moves at the target speed. The direction of the
uniform motion is determined by the input parameter Direction. The Direction value 1 indicates the positive
direction, 3 is the negative direction and 4 is the current direction. If Direction value is set to 4 and the axis is
in STOP state before the MC_MoveVelocity instruction is executed, the axis will move in the positive direction.
Execute
Invelocity
Busy
Active
CommandAborted
Error
Error ID
Case 1 Case 2
Case 4
Case 3
11-21