DVP15MC11T Operation Manual
Output Update Timing Chart
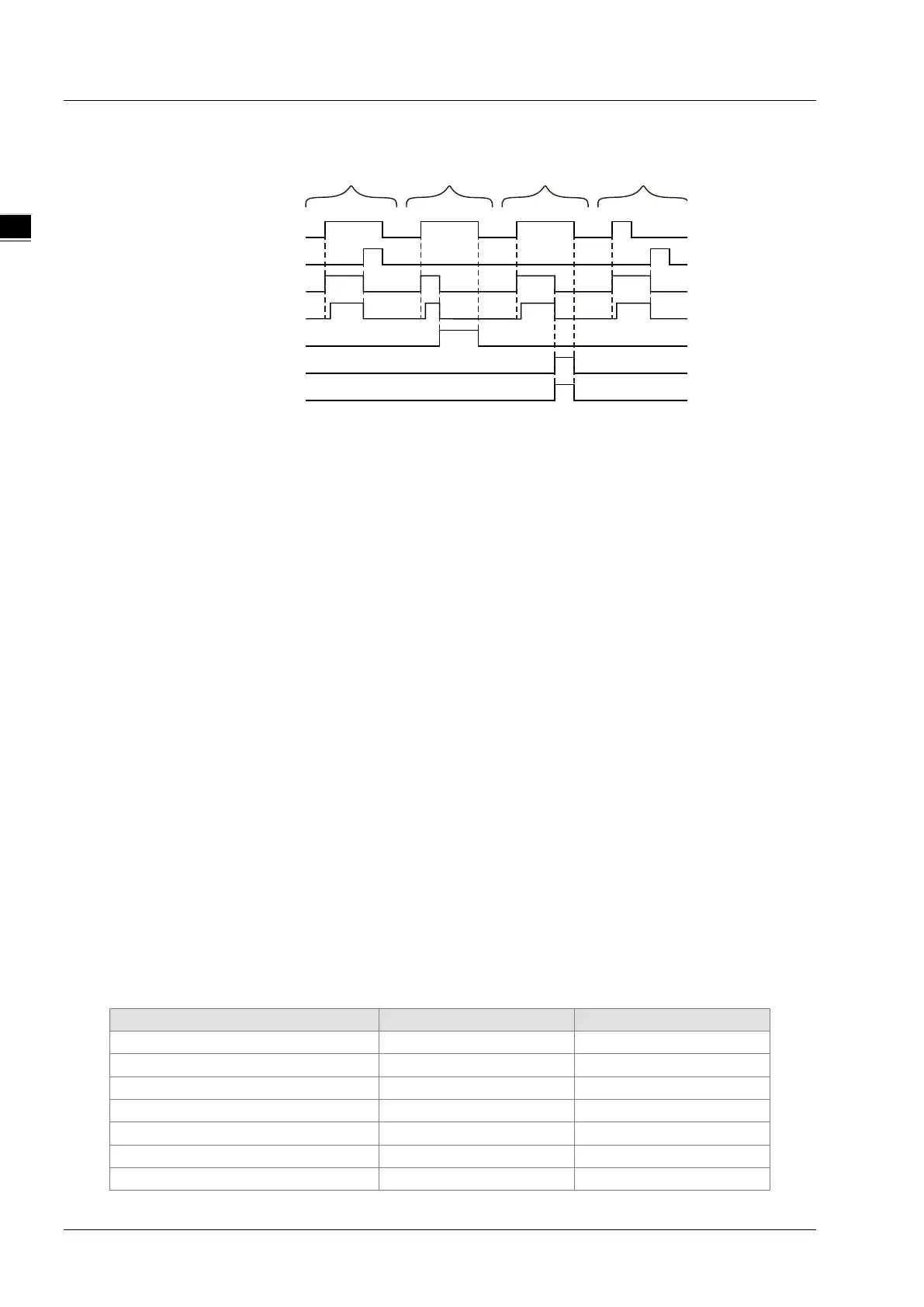
Case 1: When Execute changes from FALSE to TRUE, Busy changes to TRUE and one period
later, Active changes to TRUE. When the deceleration ends and the axis speed is
decreased to 0, Done changes to TRUE and meanwhile Busy and Active change to
FALSE.
Case 2: After Execute changes from FALSE to TRUE and the instruction is aborted by other
instruction, CommandAborted changes to TRUE and meanwhile Busy and Active change
to FALSE. When Execute changes from TRUE to FALSE, CommandAborted changes to
FALSE.
Case 3: When an error occurs such as axis alarms or Offline after Execute changes from FALSE to
TRUE, Error changes to TRUE and ErrorID shows the corresponding error code.
Meanwhile, Busy and Active change to FALSE. Error changes to FALSE when Execute
changes from TRUE to FALSE.
Case 4: In the course of execution of the instruction, Done changes to TRUE when the instruction
execution is completed after Execute changes from TRUE to FALSE. Meanwhile, Busy
and Active change to FALSE and one period later, Done changes to FALSE.
Function
MC_Halt is used to make the axis decelerate at a given deceleration rate till it stops.
The state machine enters DiscreteMotion as MC_Halt starts being executed. When the axis speed
is decreased to 0, Done changes to TRUE and meanwhile, the state machine enters Standstill.
Compared to MC_Stop instruction, MC_Halt instruction can not make the axis locked and thus the
controller can perform other motion instruction on it.
MC_Halt can be aborted through performing other motion instruction when the axis is decelerated
during execution of MC_Halt. Other motion instruction can be executed by the controller to restart
the axis after MC_Halt execution is over and the axis has stopped.
Programming Example
The example of MC_Halt execution is shown below.
1. The variable table and program
Execute
Done
Busy
Active
CommandAborted
Error
Case1 Case2 Case3 Case4
Error ID
11-28