DVP15MC11T Operation Manual
Timing for changing to TRUE Timing for changing to FALSE
CommandA
borted
When this instruction execution is aborted
by other motion control instruction.
Execute
FALSE.
CommandAborted is set to TRUE when
the instruction is aborted after Execute
changes from TRUE to FALSE during the
instruction execution. One cycle later,
CommandAborted changes to FALSE.
Error
When an error occurs in the instruction
execution or the input parameters for the
When Execute changes from TRUE to
FALSE.
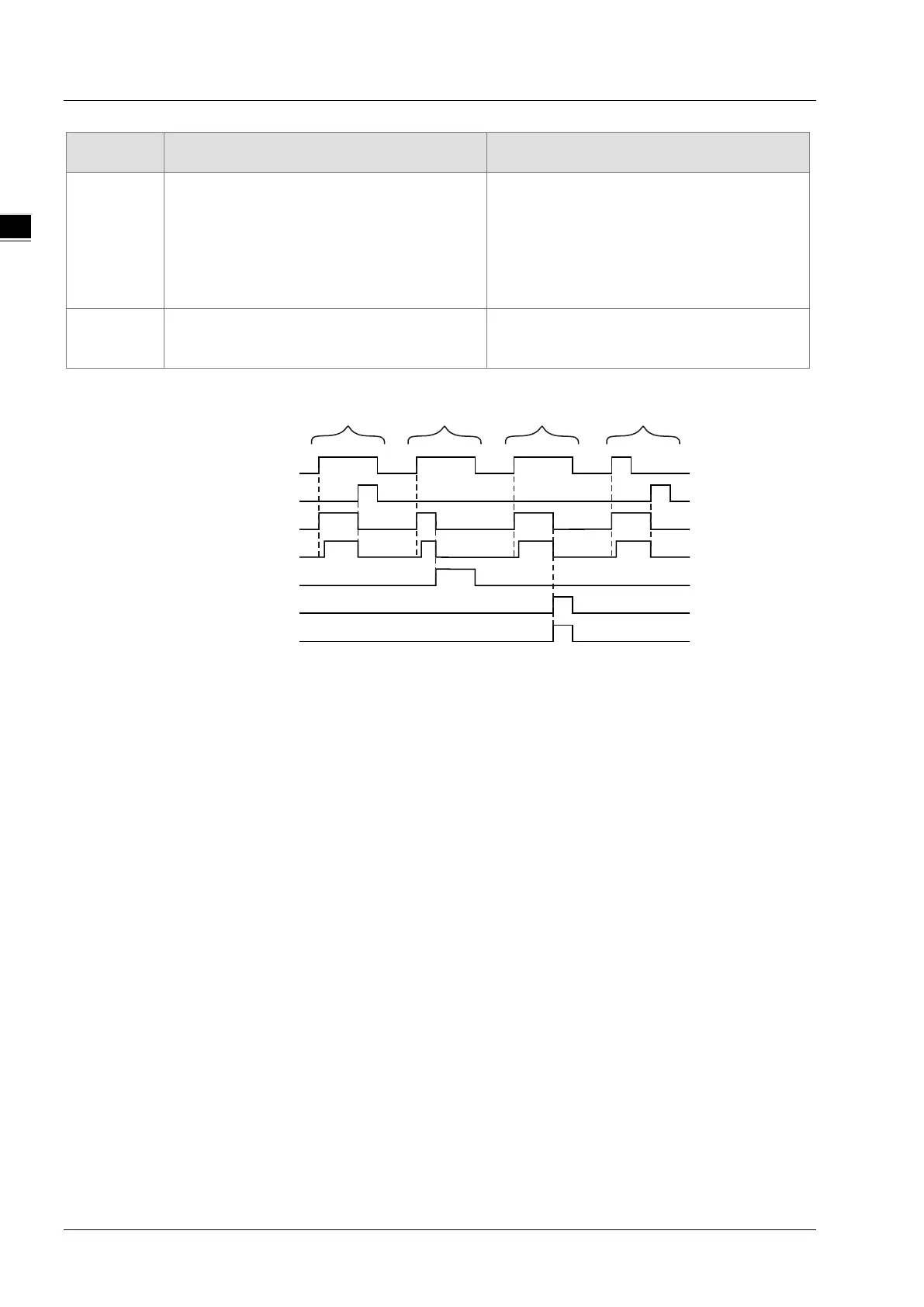
Output Update Timing Chart
Case 1: Busy changes to TRUE when Execute changes from FALSE to TRUE and one cycle later,
Active changes to TRUE. When the positioning is finished, Done changes to TRUE and
meanwhile, Busy and Active change to FALSE.
Case 2: When Execute changes from FALSE to TRUE and the instruction is aborted by other
instruction, CommandAborted changes to TRUE and meanwhile, Busy and Active change to
FALSE. CommandAborted changes to FALSE when Execute changes from TRUE to FALSE.
Case 3: When an error occurs such as axis alarm or Offline after Execute changes from FALSE to
TRUE, Error changes to TRUE and ErrorID shows the corresponding error code. Meanwhile,
Busy and Active change to FALSE. Error changes to FALSE when Execute changes from
TRUE to FALSE.
Case 4: In the course of execution of the instruction, Done changes to TRUE when the instruction
execution is completed after Execute changes from TRUE to FALSE. Meanwhile, Busy and
Active change to FALSE and one cycle later, Done changes to FALSE.
Function
MC_MoveRelative is used to make the axis move for a given distance by starting from the command
current axis position at a given speed, acceleration, deceleration and Jerk.
Execute
Done
Busy
Active
CommandAborted
Error
Error ID
Case 1
Case 2 Case 3
Case 4
11-38