Chapter 12 Troubleshooting
1
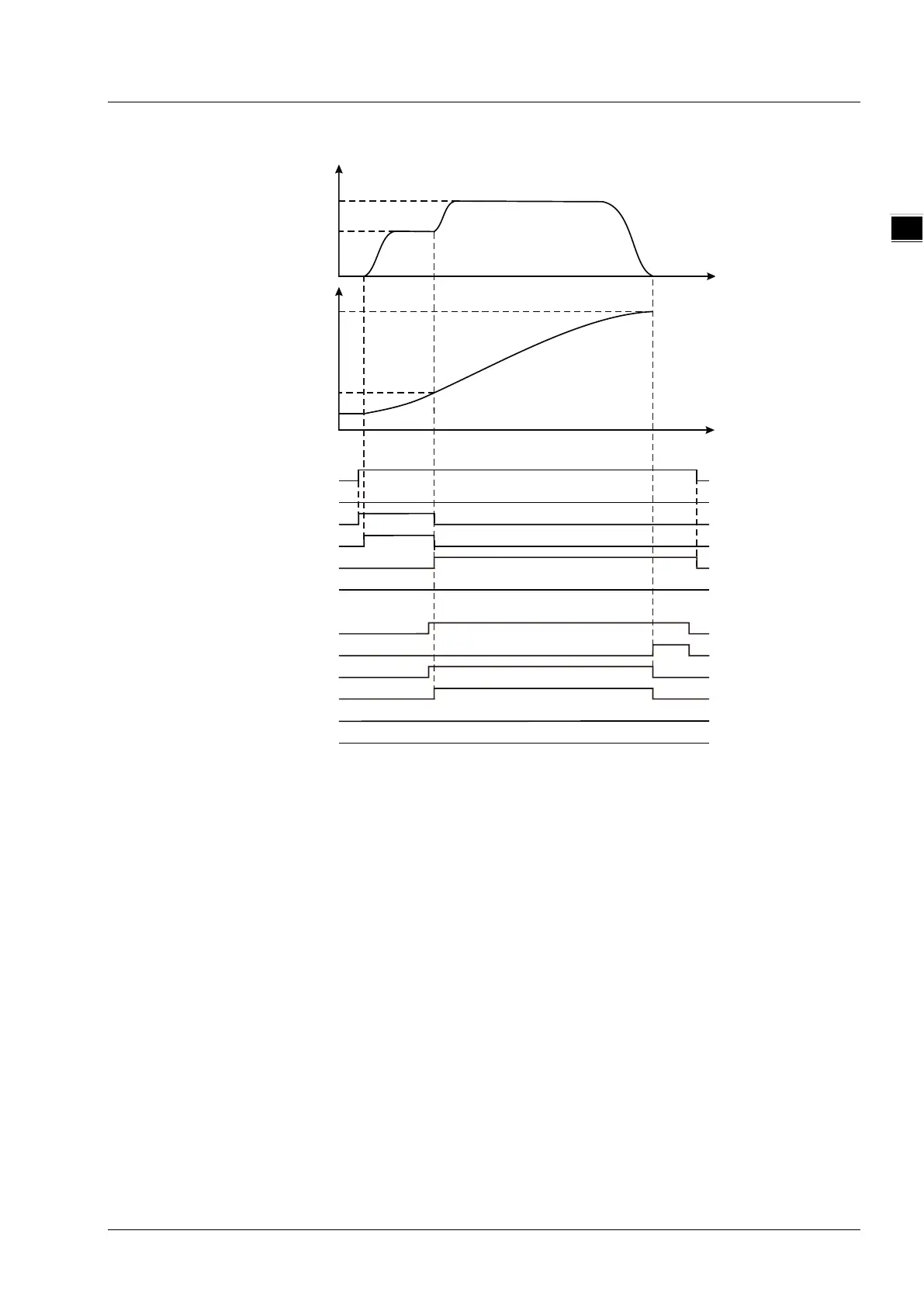
2. Motion Curve and Timing Charts:
When Addt1_Ex changes from FALSE to TRUE, the motion controller controls the motion of
the servo motor taking current position as the reference point. When Addt2_Ex changes from
FALSE to TRUE, Addt2_Bsy changes from FALSE to TRUE and one period later, the first
MC_MoveAdditive instruction is aborted and Addt1_Abt changes from FALSE to TRUE.
Meanwhile, the servo motor moves according to the parameters of the second
MC_MoveAdditive instruction. Addt2_Done changes from FALSE to TRUE when the servo
motor completes the set distance which is the total sum of the two set distances of the two
instructions.
When Addt2_Ex changes from TRUE to FALSE, Addt2_Done is reset.
500
17000
3500
2000
600
Addt1_Ex
Addt2_Ex
Addt1_Done
Addt1_Bsy
Addt2_Bsy
Addt1_Act
Addt2_Act
Addt2_Done
Addt1_Abt
Addt2_Abt
Addt1_Abt
Addt2 Err
Velocity
Position
Time
Time
Addt1
Addt2
11-51