DVP15MC11T Operation Manual
Output Update Timing Chart
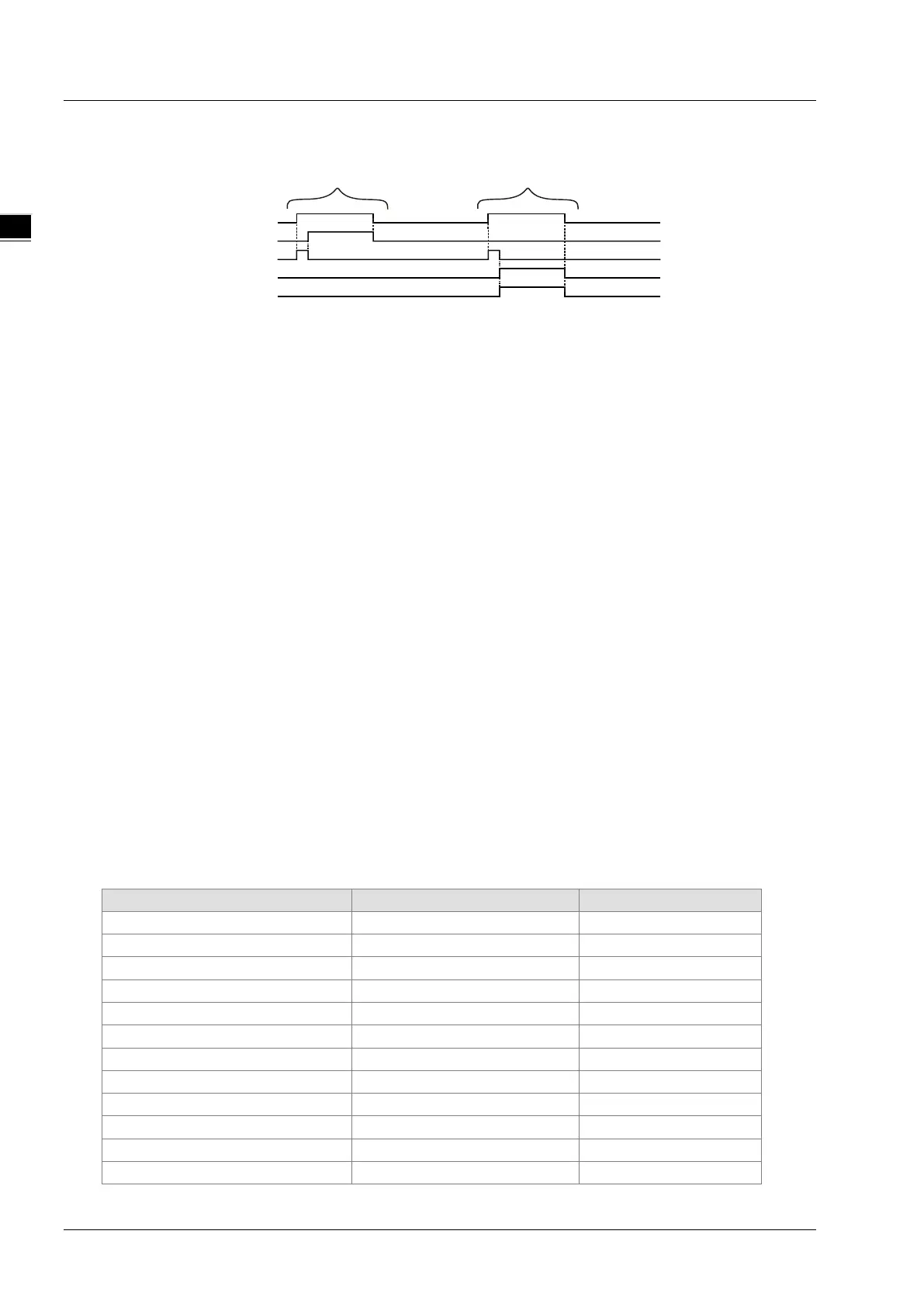
Execute
Done
Busy
Error
Error I D
Case 1 Case 2
Case 1: When Execute changes from FALSE to TRUE, Busy changes to TRUE. When the instruction
execution is completed, Done changes to TRUE and Busy changes to FALSE. When Execute
changes to FALSE, Done changes to FALSE.
Case 2: When an error occurs, Error changes to TRUE and ErrorID shows corresponding error code.
When Execute changes from TRUE to FALSE, Error changes to FALSE and the value of
ErrorID is cleared to 0.
Function
MC_Reset clears the error state and axis alarm information about the real axis or virtual axis inside
DVP15MC11T. The axis state can be observed via MC_ReadStatus.The MC_Reset instruction can be
executed to clear the errors when the axis configured in DVP15MC11T enters the ErrorStop state. The
instruction can be executed no matter whether the axis enters the ErrorStop state or not. When the
errors such as axis alarms, axis offline or state machine switch problems occur, the axis enters the
ErrorStop state and the motion instructions which are being executed stop. When the axis alarms, the
execution of the instruction can clear the axis alarm information. After the execution of MC_Reset
instruction is completed, the axis state will be determined by MC_Power instruction and the axis will be
in Disabled or Standstill state.
Refer to chapter 9 for explanation of axis states.
After the axis alarm occurs, excluding the alarm which occurs when the axis meets the limit swtich in the
course of homing, the alarm axis enters the ErrorStop state inside DVP15MC11T. The axis alarm can
be eliminated if Done is TRUE after the instruction is executed. If Error is TRUE, the axis alarm cannot
be eliminated and users should check if the cause of the error still exists.
Programming Example
When ReadSt_En is TRUE, the MC_ReadStatus instruction will detect the status of axis 1. When axis 1
enters the ErrorStop state due to axis offline or alarm, ErrorStop of the MC_ReadStatus instruction will
change to TRUE and the MC_Reset instruction will be executed.
1. The variable table and program
ReadSt_Disbl BOOL
ReadSt_Stans BOOL
11-88